Hexapod
Intro
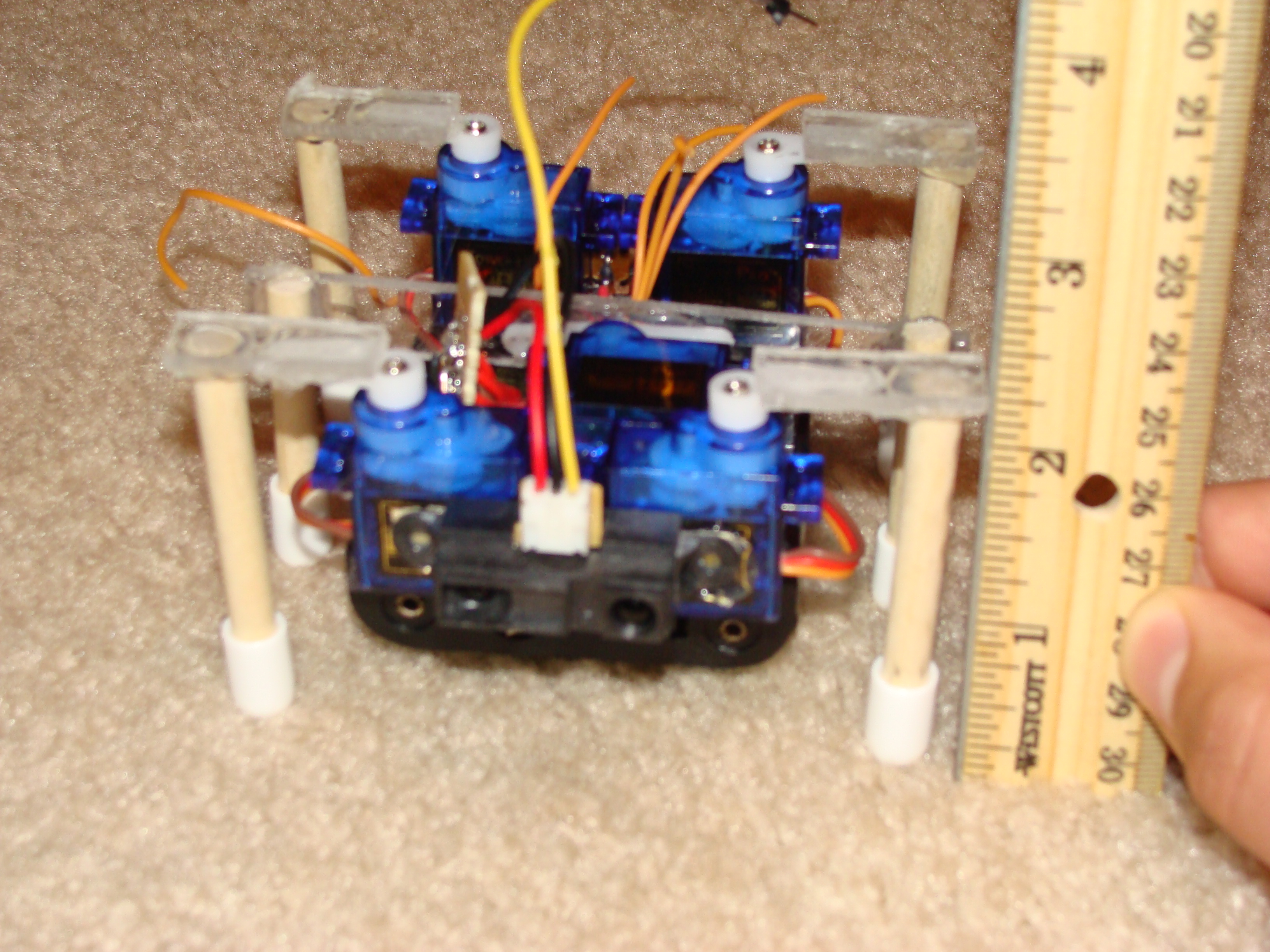
This is my first robot with legs as its mode of transportation. The robot can be seen running the original code in the second video above. With that code, the robot simply turned right and then left. It then would compare the two readings from each side to decide which was the most open path to travel. I improved upon this with my 1.1 code update as seen in the first video. The basic parts of this robot include lexan, five $0.99 servos, a Sharp IR sensor, and an Arduino micro-controller.
Code Update 1.1
The hexapod now has better code for sensing and decision making. The hexapod makes a 360 spin which it takes as a 9 point turn. At each point it takes a reading. It then compares all the readings and decides which point was the best. It then will turn back to that point and continue on with its exploring. In the video I demonstrate this with a small gap for the robot to go through. The robot basically is making a simple map and finding the clearest way to go. The robot still has a curve in its walk that I need to fix.
Construction
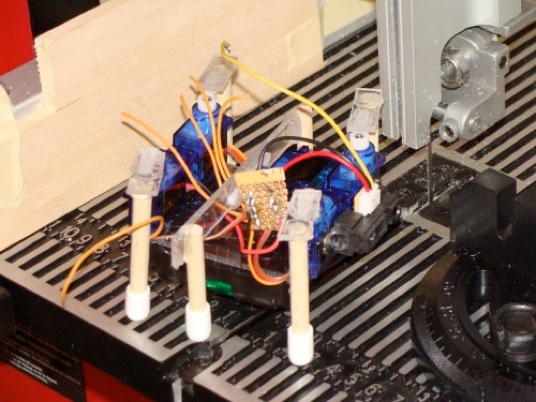
I used a saw that I recently purchased to cut out the parts for this robot.

I found this lexan at The Home Depot. I am starting to like it as a building material.

Hot glue was used to attach everything to the robot. I found this to be the easiest method.


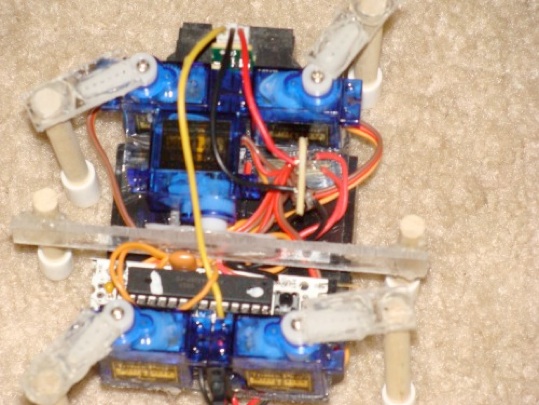
Below you can see my little power distribution board that distributes power to all the servos. The orange signal pins will go to the micro-controller.
Below you can see the micro-controller and the orange wires wired to it along with the analog output of the IR Sharp sensor.