
Creepy Bearduino
Built in 2010
Creepy Bearduino was made out of a teddy bear, cup, PIR sensor, and an Arduino RBBB micro-controller board. The PIR sensor detects when people walk into the room, which allows the bear to react by turning its head and lighting up its eyes. The bear can be powered by a 5V wall power supply or four AA batteries.
View Project
Chess Robot V1
Built in 2009
This project was my first attempt at a chess playing robot. This robot never successfully played chess, so it was replaced with my Chess Robot V2, which does work. However, much of the design of the second version is based on this one.
View Project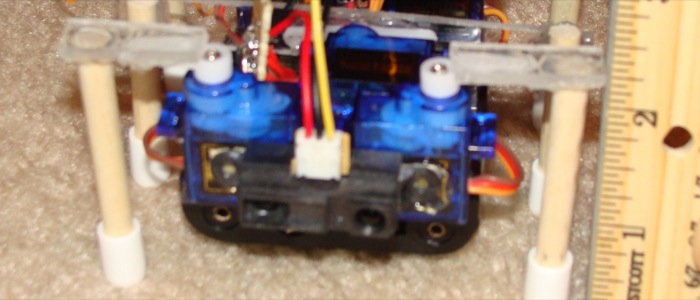
Hexapod
Built in 2009
This is my first robot with legs as its mode of transportation. It is programmed with an obstacle avoidance behavior. The basic parts of this robot include lexan, five $0.99 servos, a Sharp IR sensor, and an Arduino micro-controller.
View Project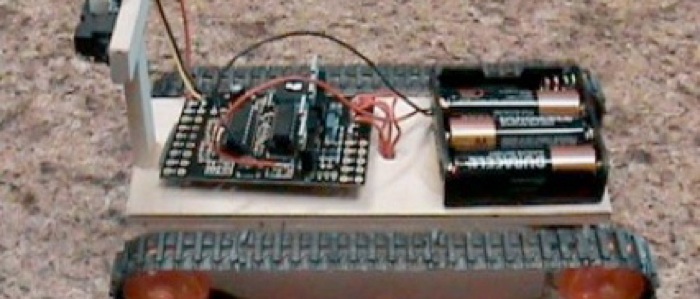
Explorer
Built in 2009
This was my first robot. It uses a Picaxe 18 Power Board. The robot’s main goal is to explore. To do this, it drives around and when the Sharp IR distance sensor detects an obstacle it turns left and right. The robot compares the distance readings from the left and right and decides which way is the most open path to explore.
View Project