Explorer
Description
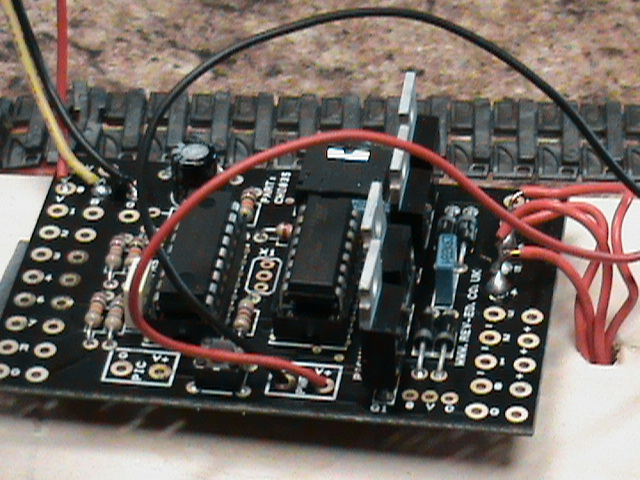
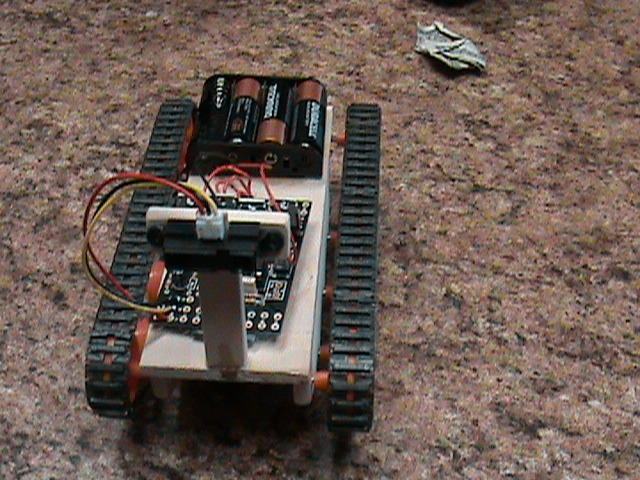
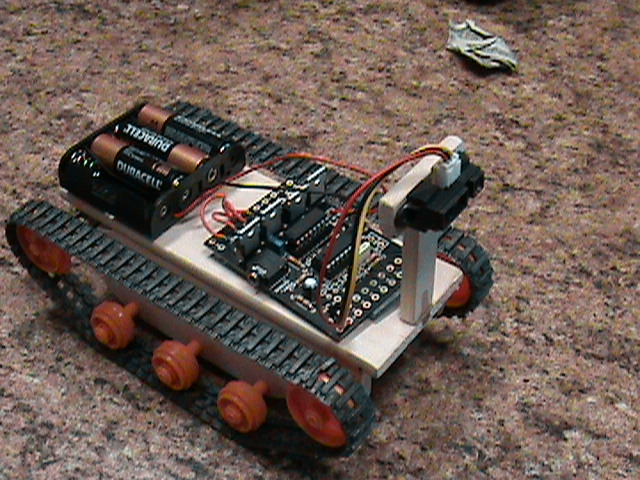
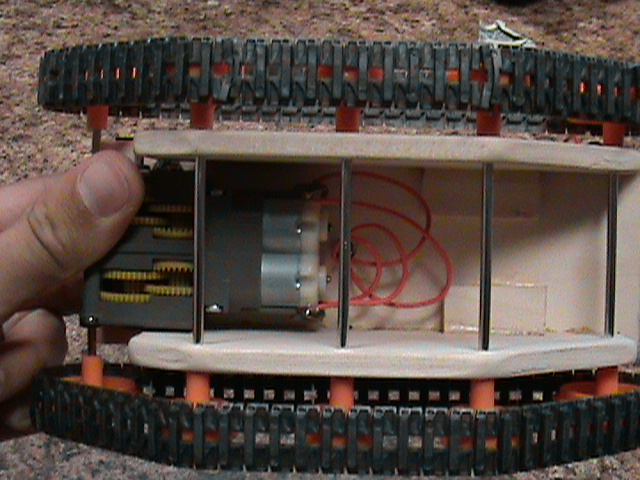
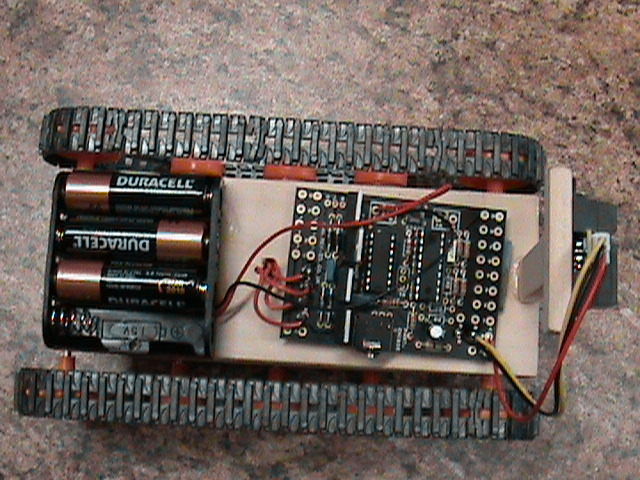
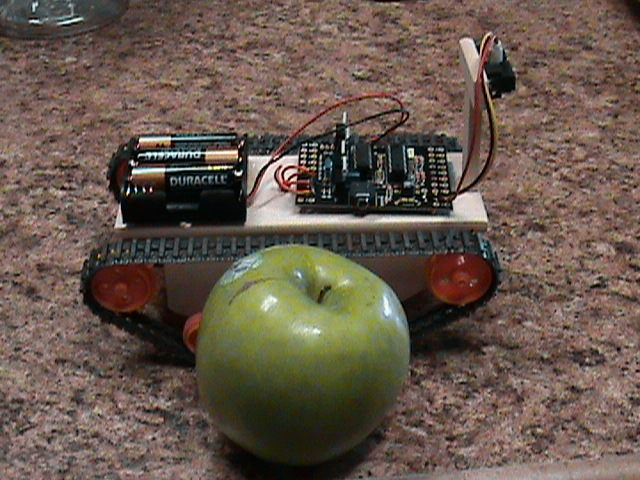
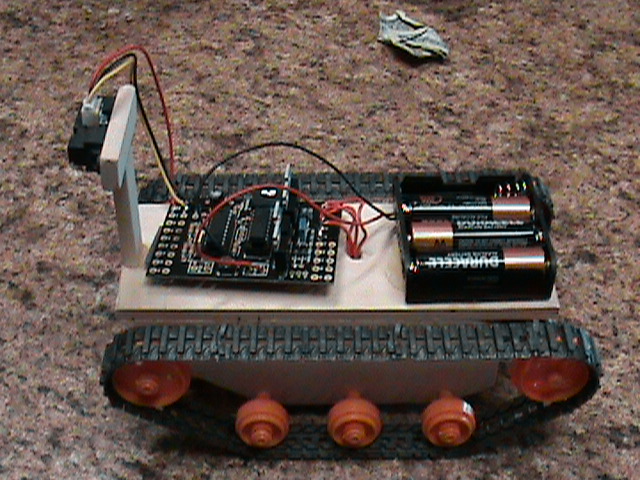
This was my first robot. It uses a Picaxe 18 Power Board. The robot’s main goal is to explore. To do this, it drives around and when the Sharp IR distance sensor detects an obstacle it turns left and right. The robot compares the distance readings from the left and right and decides which way is the most open path to explore. Once this decision is made, the robot will execute it and drive in that direction - starting this process all over again.
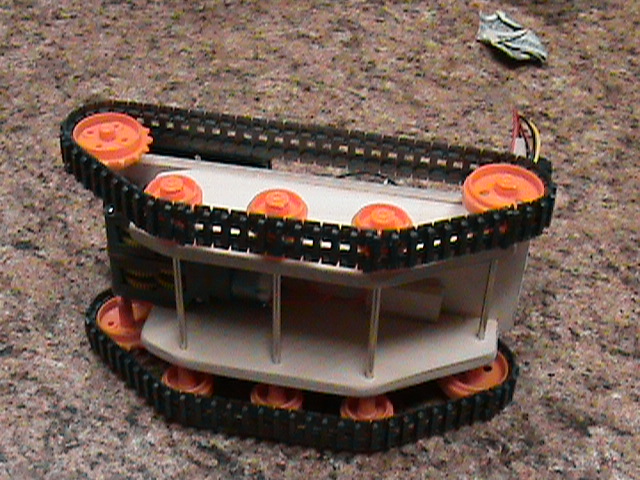
The chassis is made from balsa wood bought at the local craft store. The tank track set and gear motor are made by Tamiya. Like I said before, the robot’s sensor is a Sharp IR distance sensor. This was my only robot to use a Picaxe. I switched to using Arduino after this robot.