Maze Solving Robot V2

Description
This was my 2nd attempt at making a maze solving robot. See my 3rd version, which is a much better robot and includes a better description of maze solving.
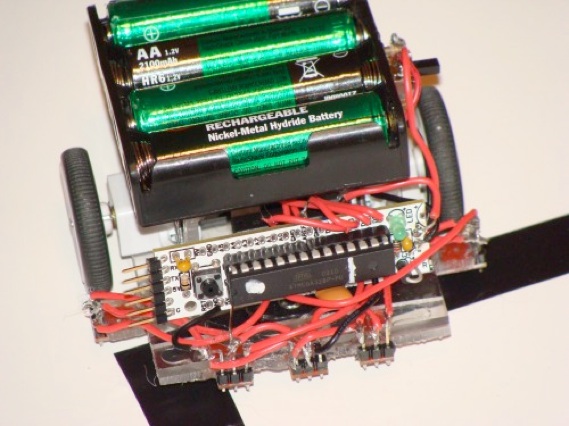
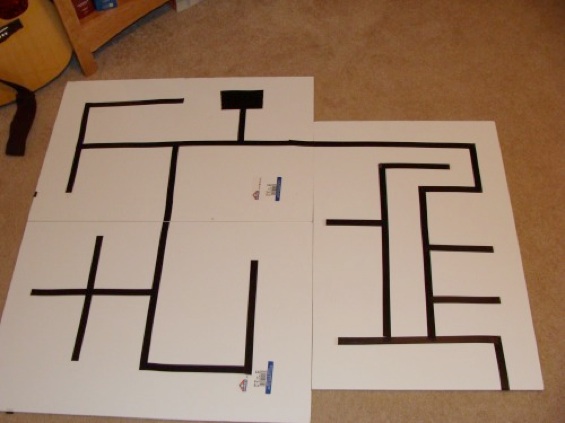
This is my maze solving robot. It uses an Arduino RBBB from wulfden.org. It has two 30:1 micro gear motors. The robot has five reflectance sensors for sensing the line. The three in front are for following and staying on the line. It does this by slowing down a certain motor depending on which way the robot has come off the line. The two sensors near the back of the robot on the left and right sides are for sensing the turns in the maze. The maze has many different intersections and it knows what to do at all of them.
This is done using the left hand on the wall technique. This means that if it can turn left then it turns left, else if it can go straight it goes straight, else if it can turn right then it turns right and finally if it can't do any of those then it is at a dead end and turns around. Here is a great pdf that explains that.