Connect Four Robot
Introduction
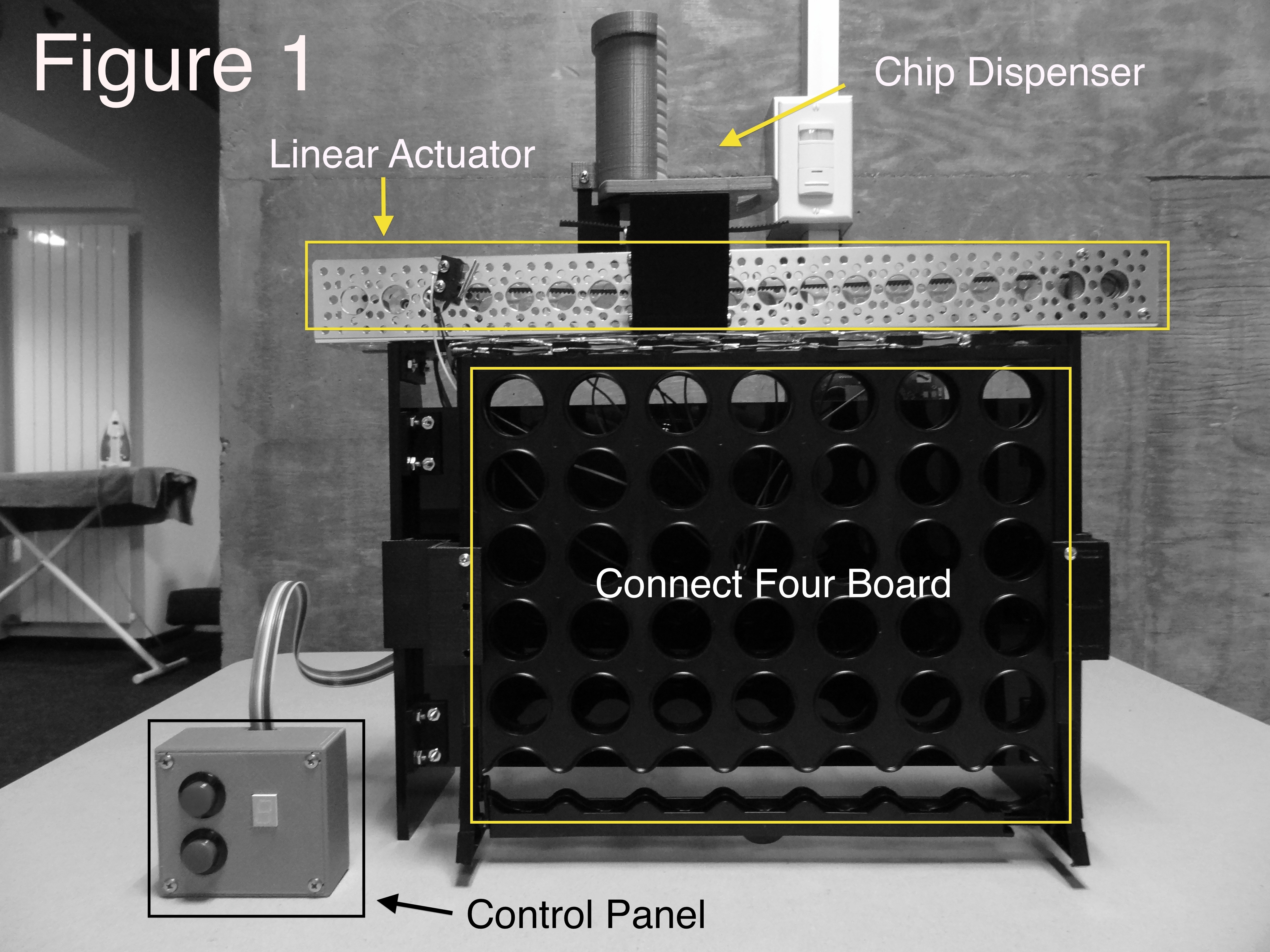
This Connect Four robot was my final project for my Microcomputer Project Laboratory course. We had complete freedom over choosing our final project, but there were two rules we had to follow. First, we had to use the Cypress PSOC 5LP kit that was given to us at the beginning of the course. Second, we had to use an 8051 micro-controller or another micro-controller that can be programmed in the same assembly language (I went with the 2051, but more on that later). Besides these rules, the final project should obviously incorporate topics that were taught in the course. We had about 5 weeks to complete our final project.
This post is going to be a little different than usual. I have already written in detail about this robot in various documents that I had to turn in to be graded. For the most part I will be giving you those documents to explore further if you are interested.
Documentation and Code
With this being a school project, I had to write a lot of documentation on the robot. If you are interested in the details of the robot then I suggest you read the various documents linked below. I am going to avoid repeating myself here.
Figures Referenced in Project Report

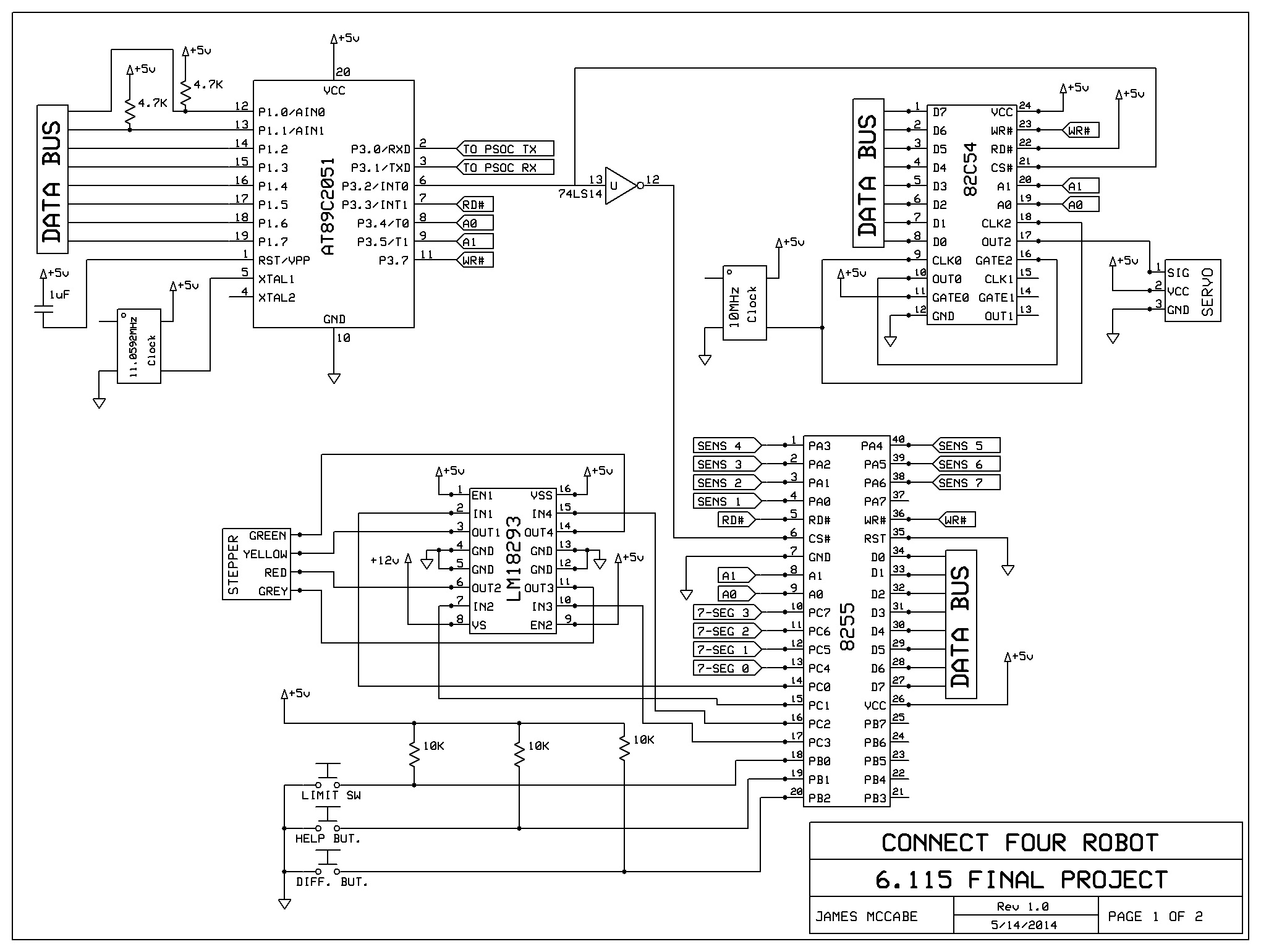
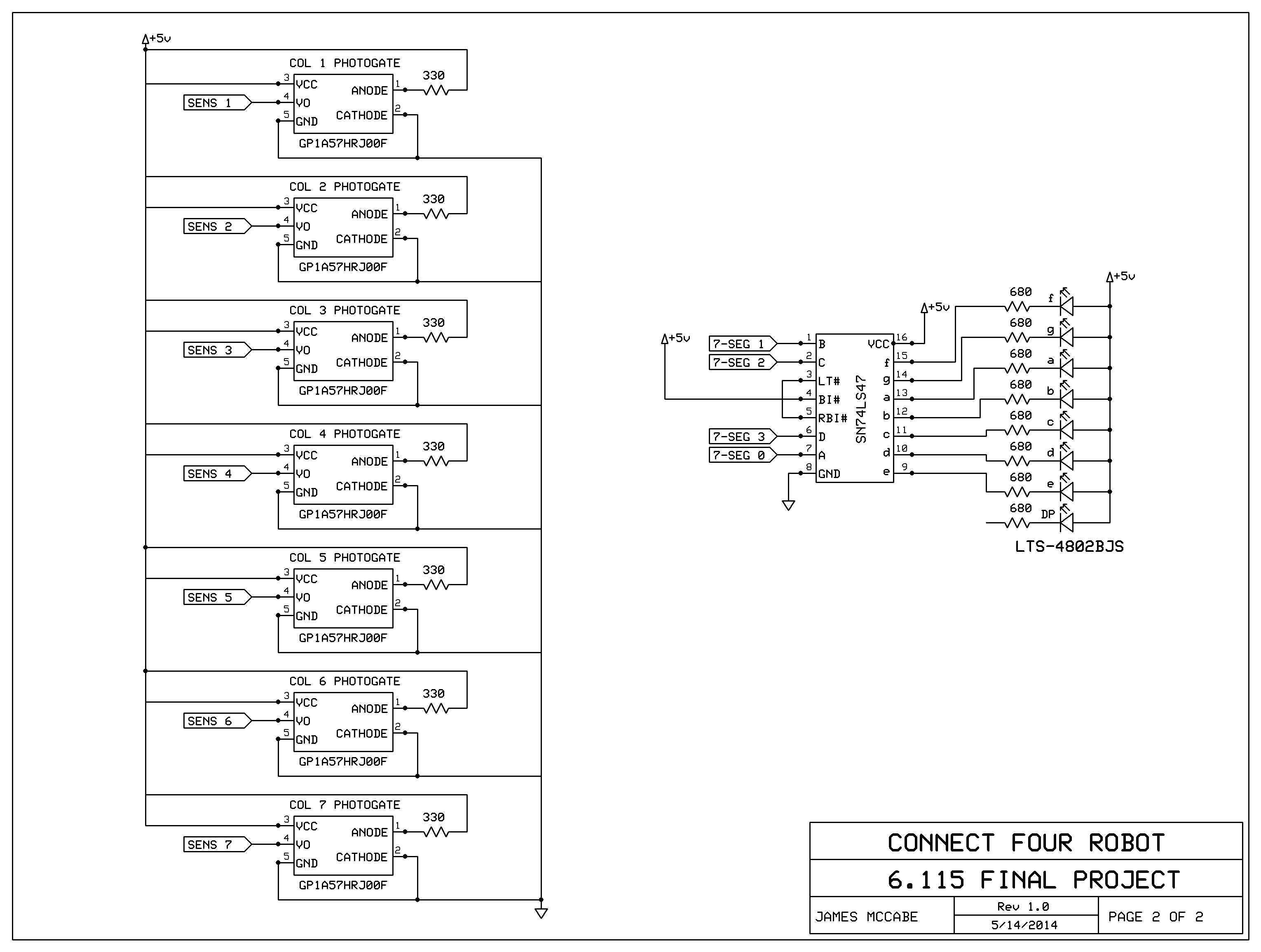
Schematic
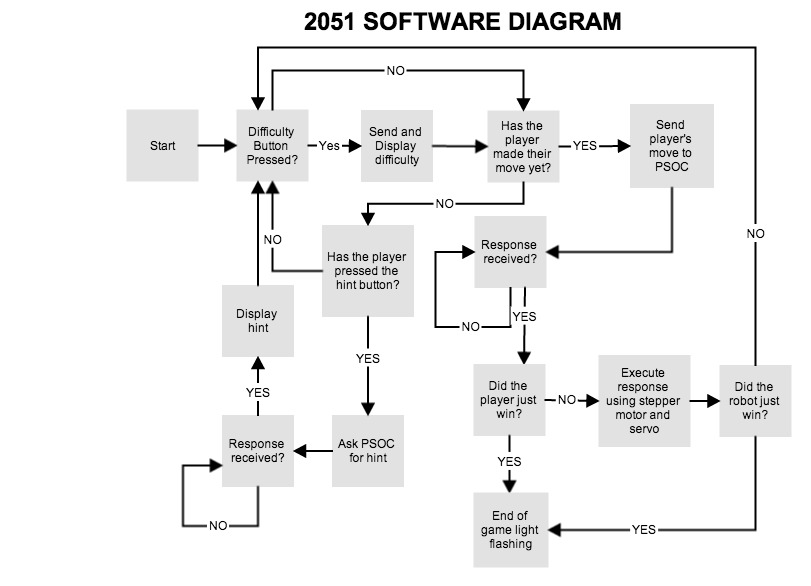
Firmware Flowchart
Parts List
Here is a list of some of the main parts I used. This list excludes custom made parts (i.e. 3D printed or laser cut) and electronic components (those can be found in the schematic).
Custom Parts
There are a lot of custom parts on this robot. The parts were all designed in Solidworks. The 3D parts were printed on my UP Mini 3D printer. The acrylic parts were laser cut at MIT's Cypress Engineering Design Studio.
Instead of listing out all of the custom parts, I am just going to give you a ZIP with all of the Solidworks files, STL files, and DXF files. So here it is.
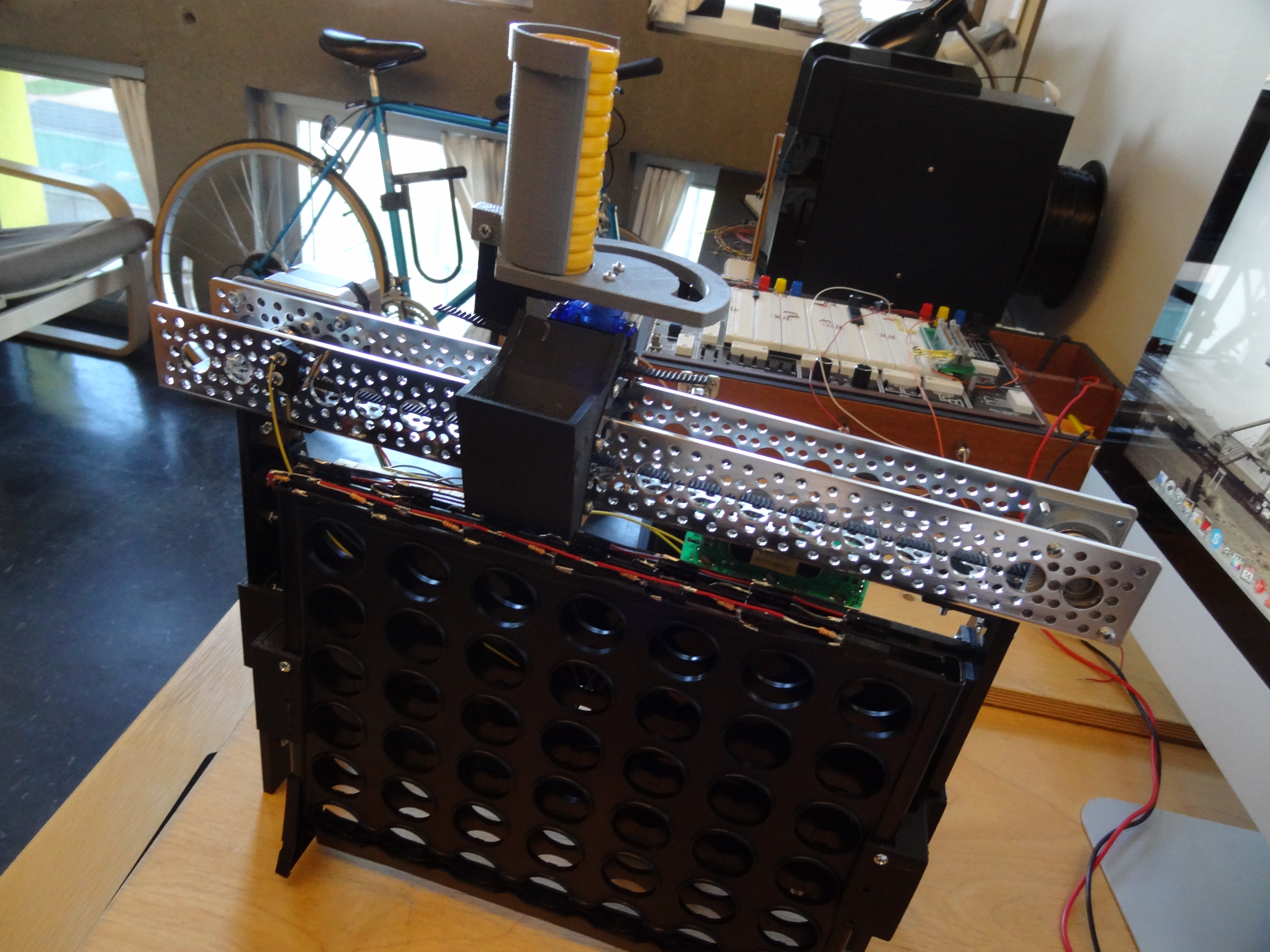
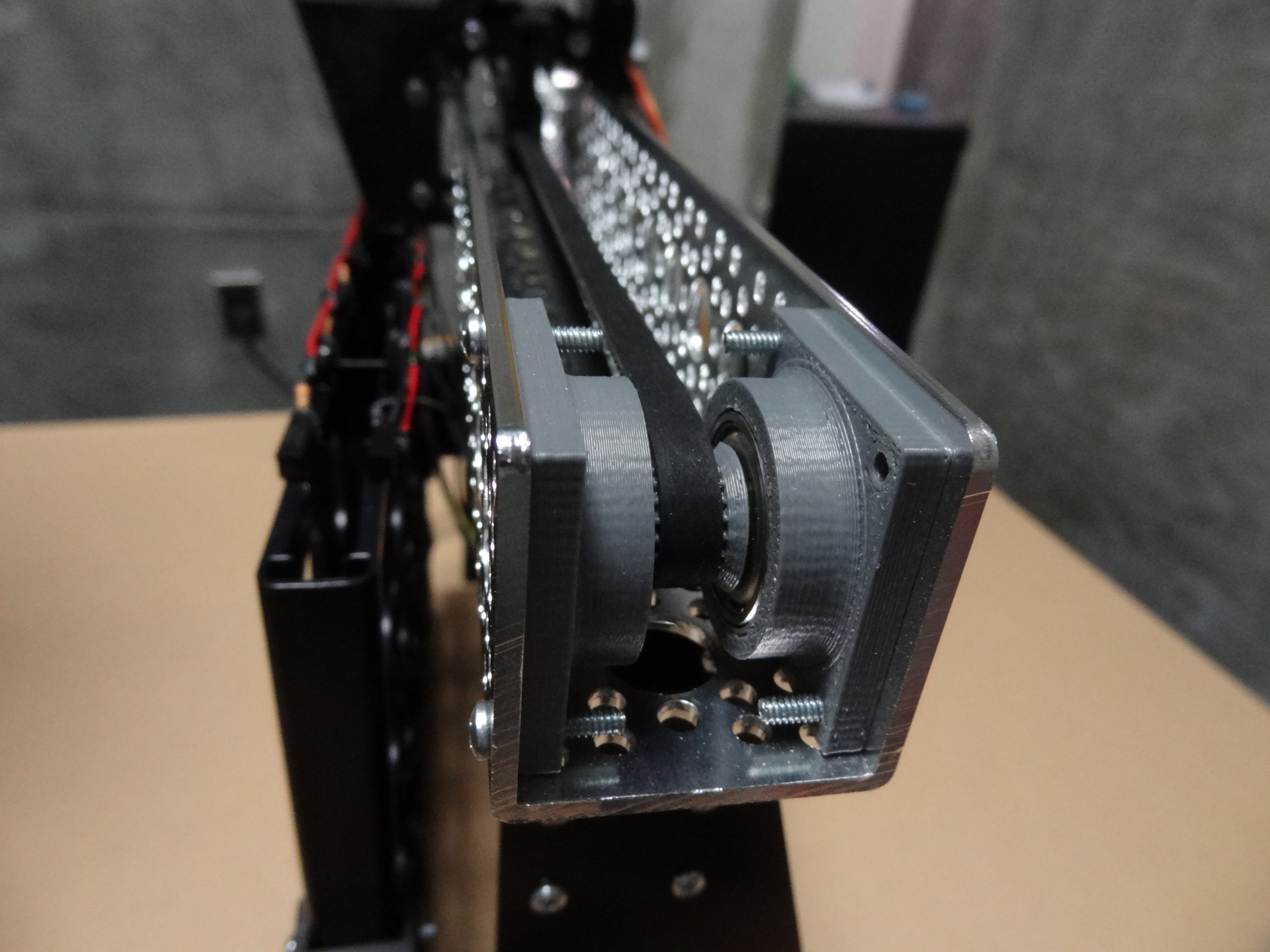
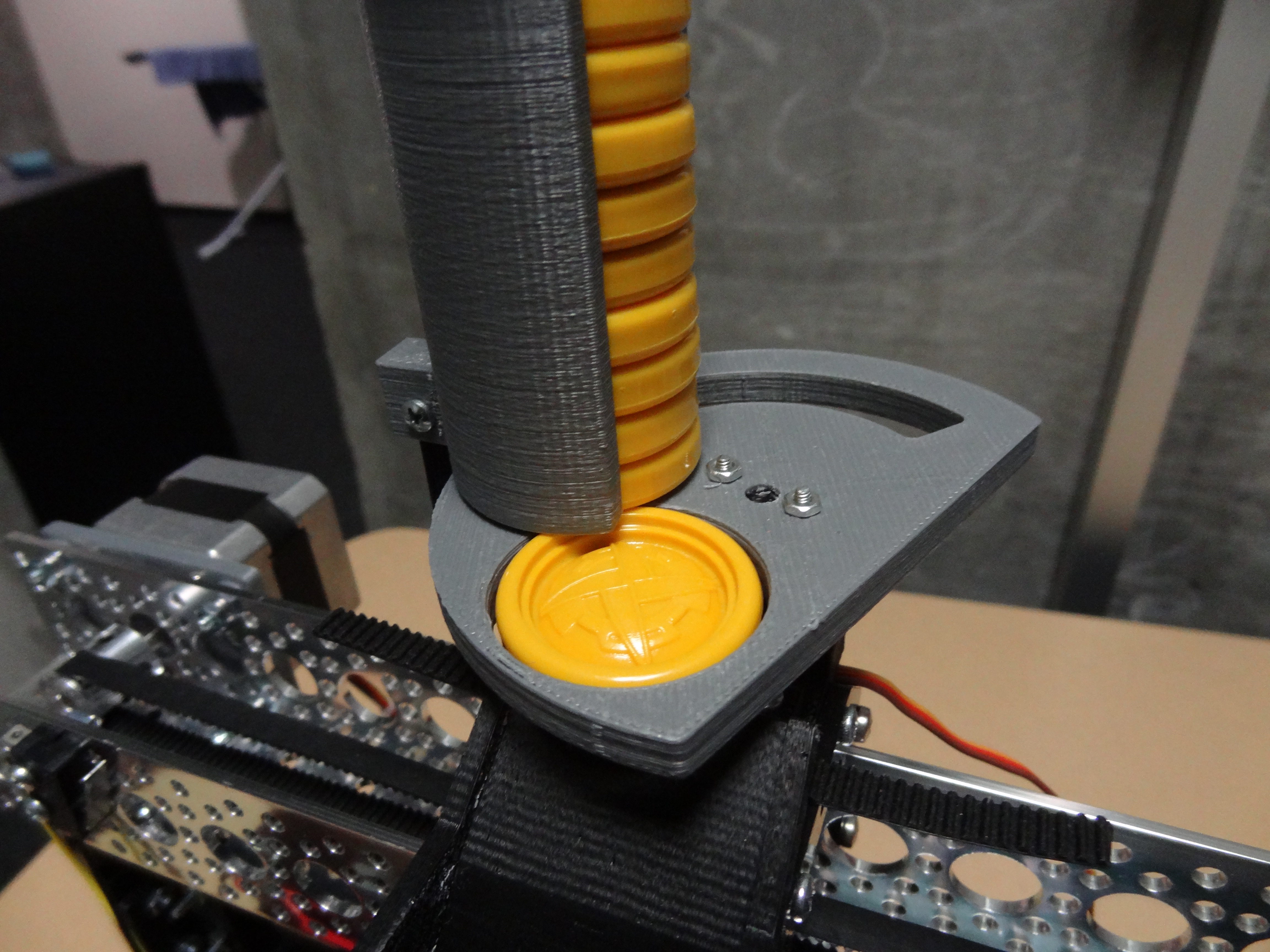
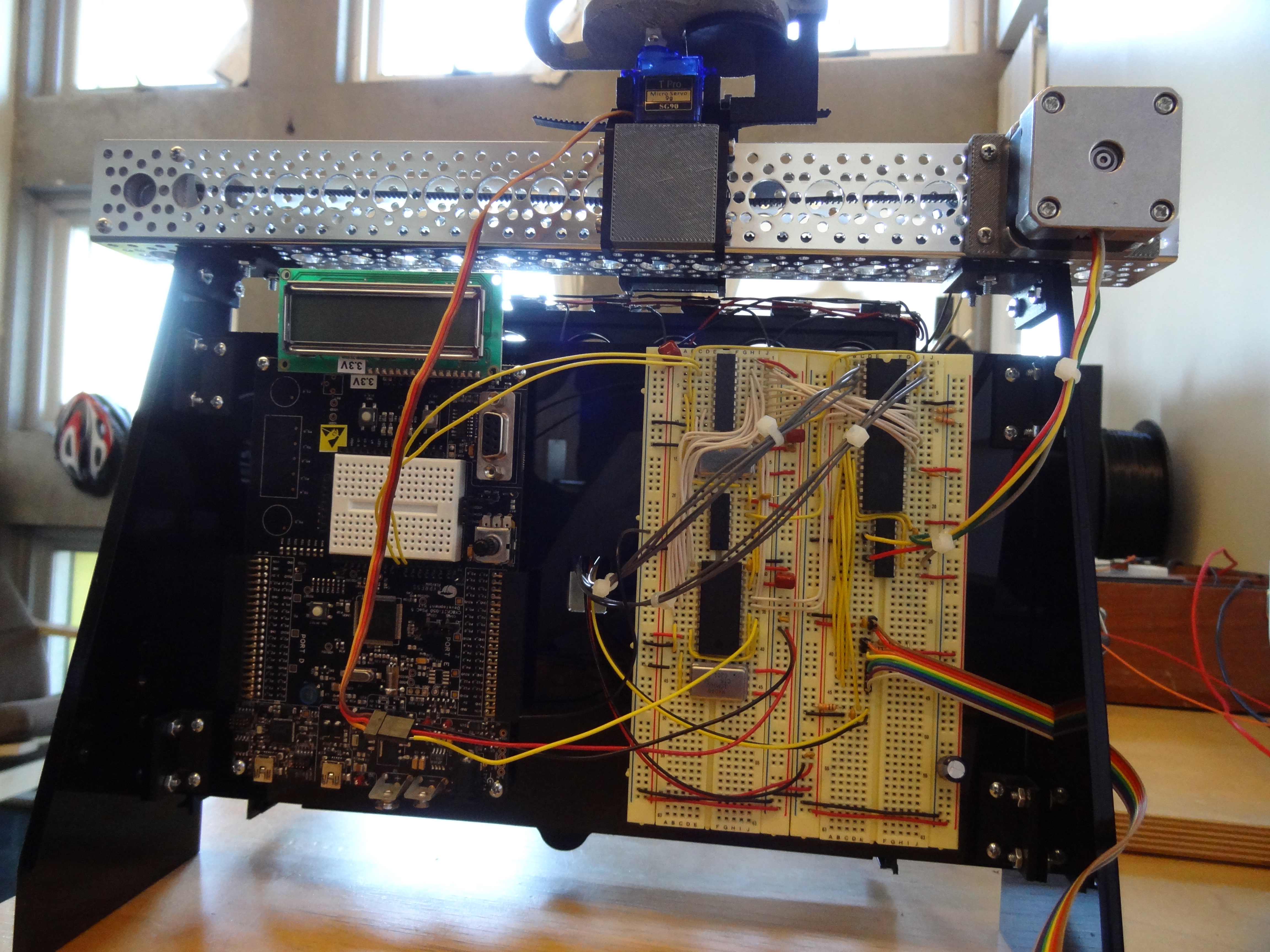
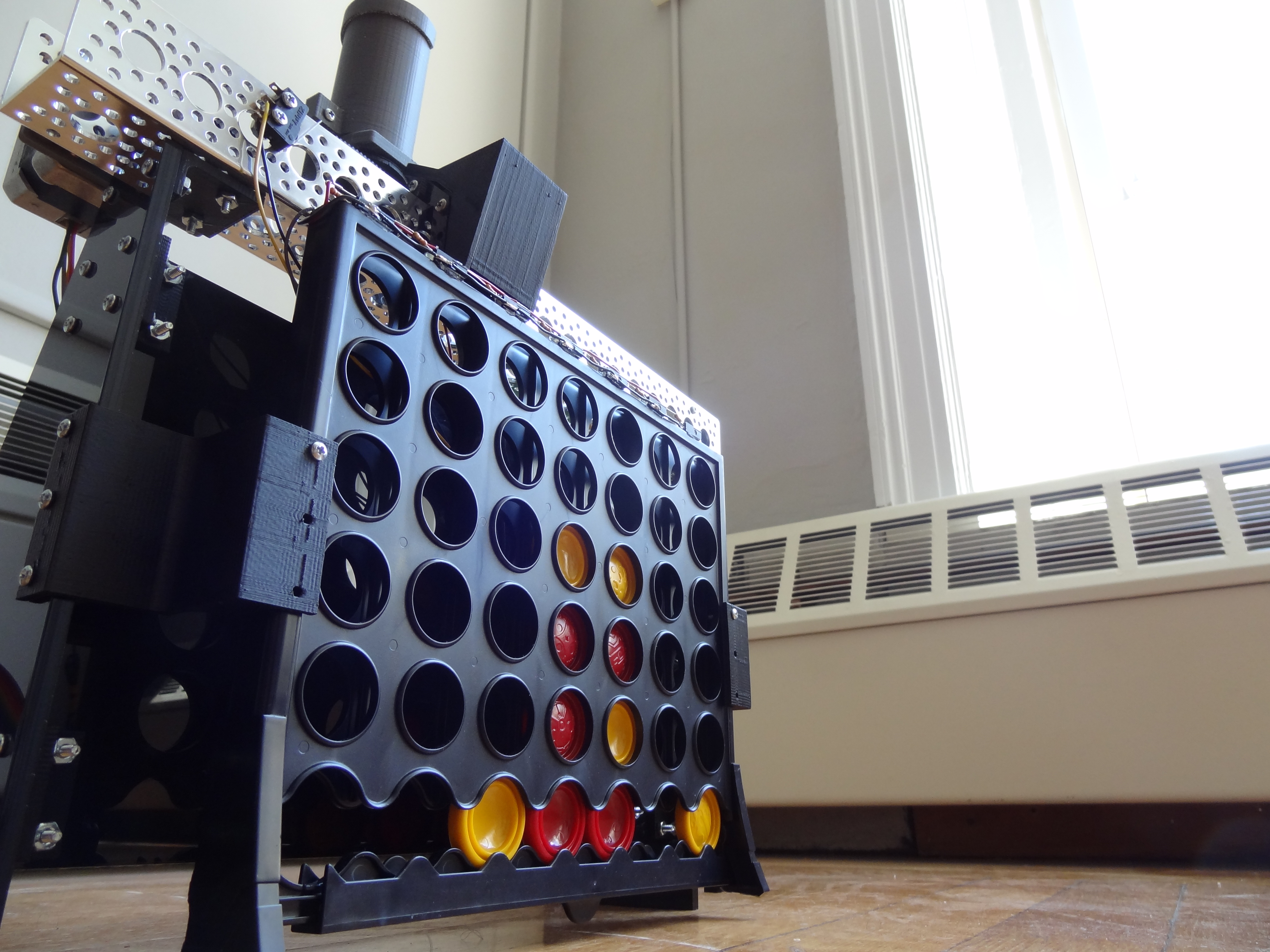
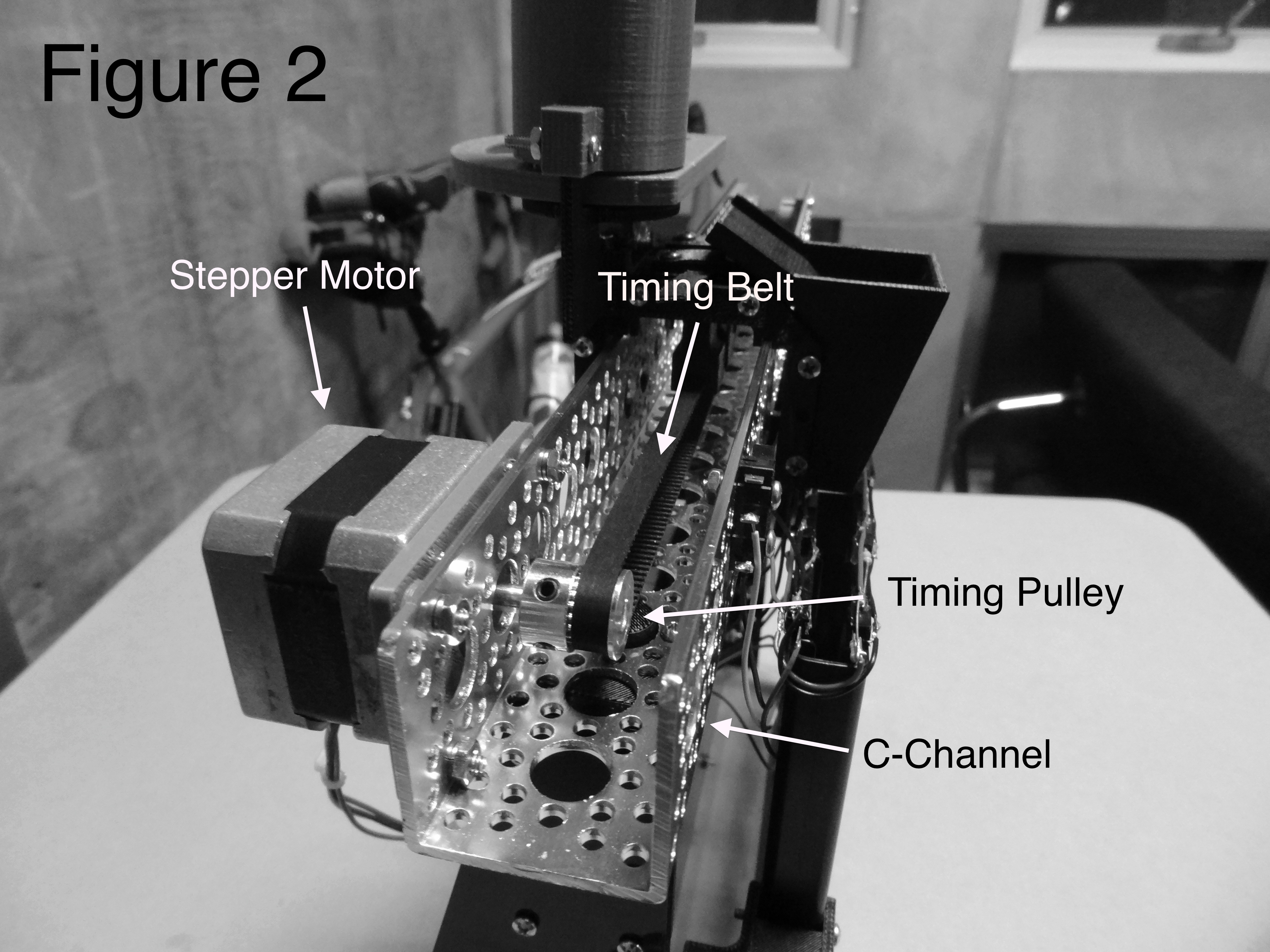
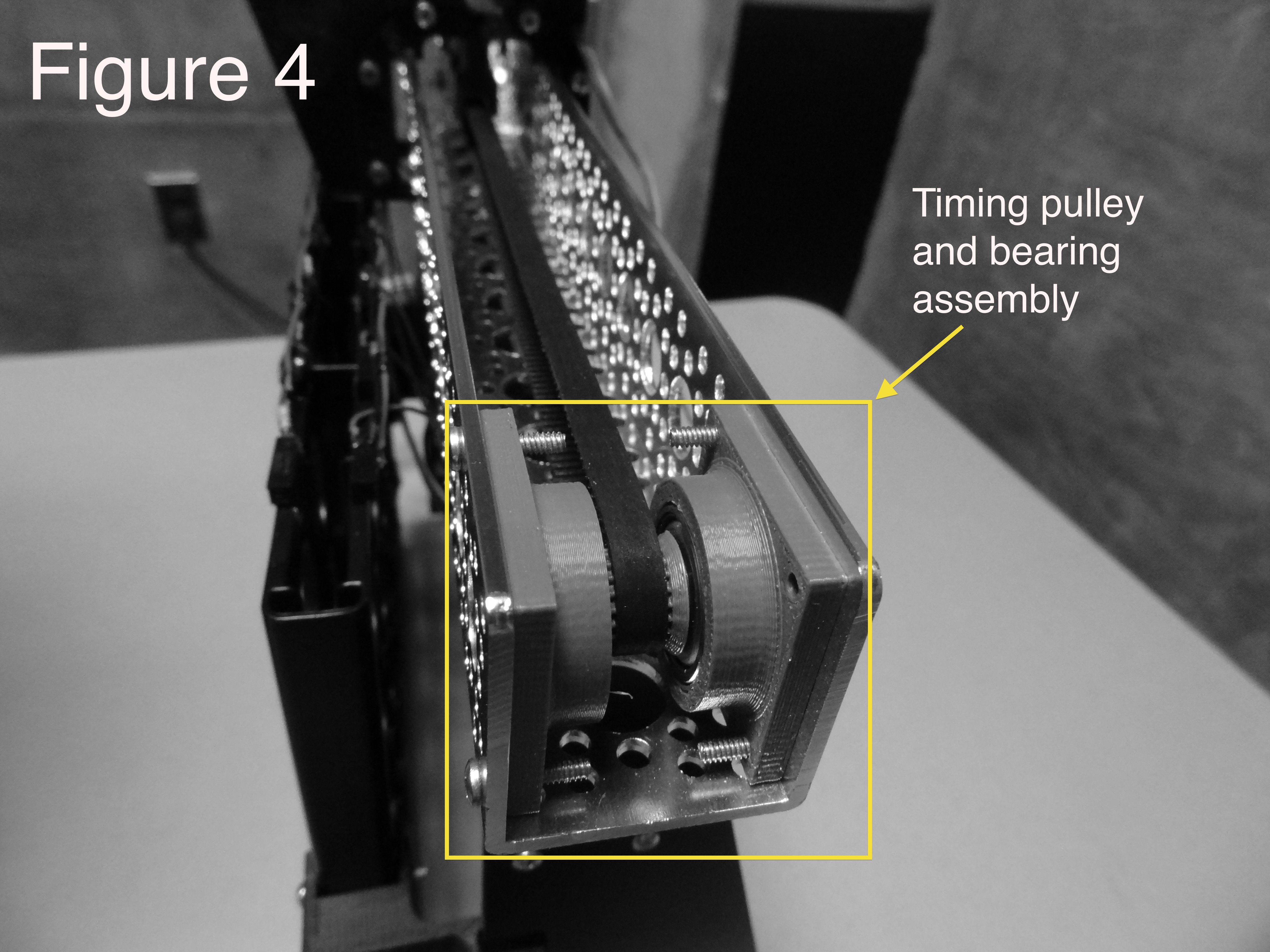
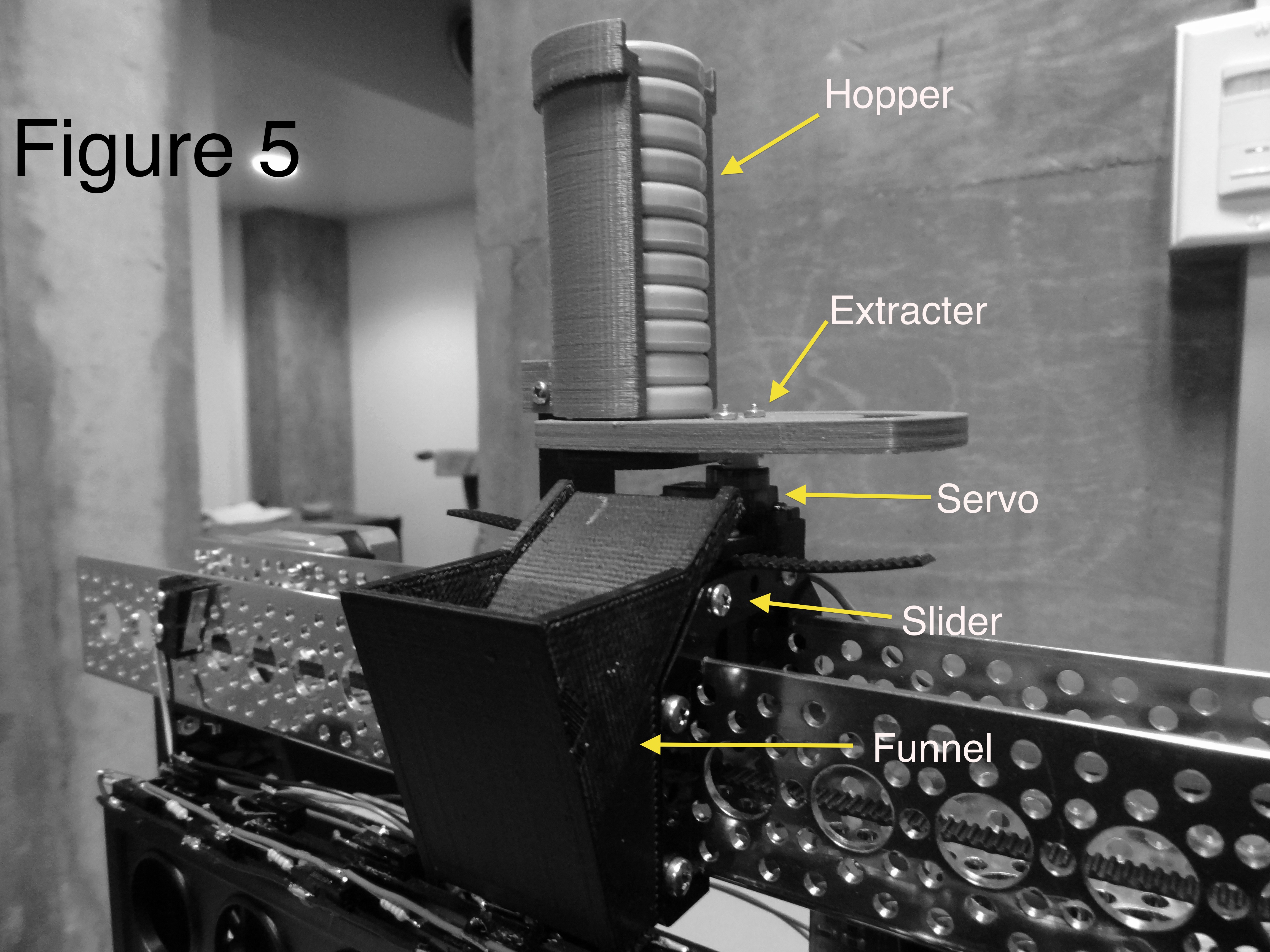
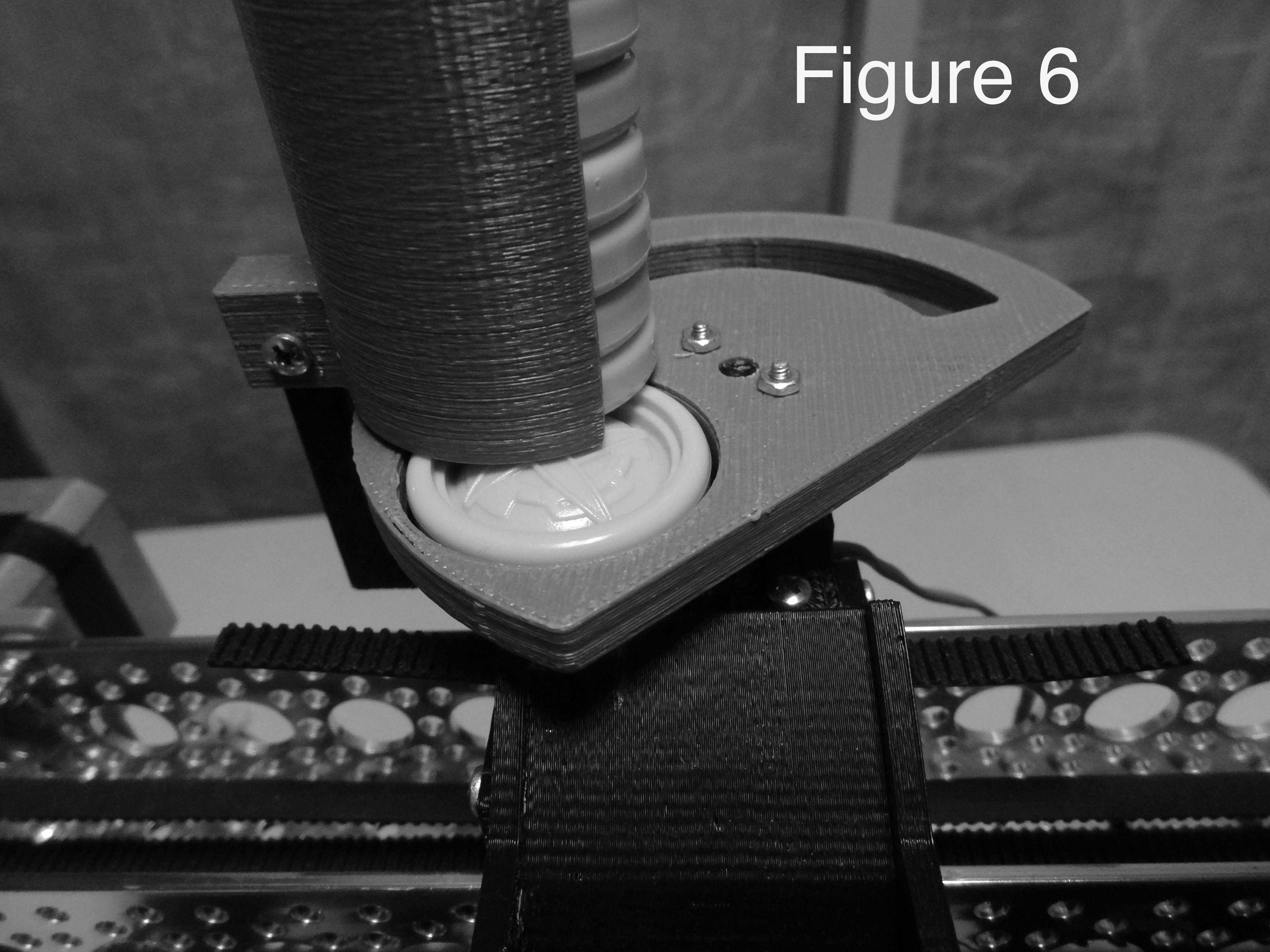
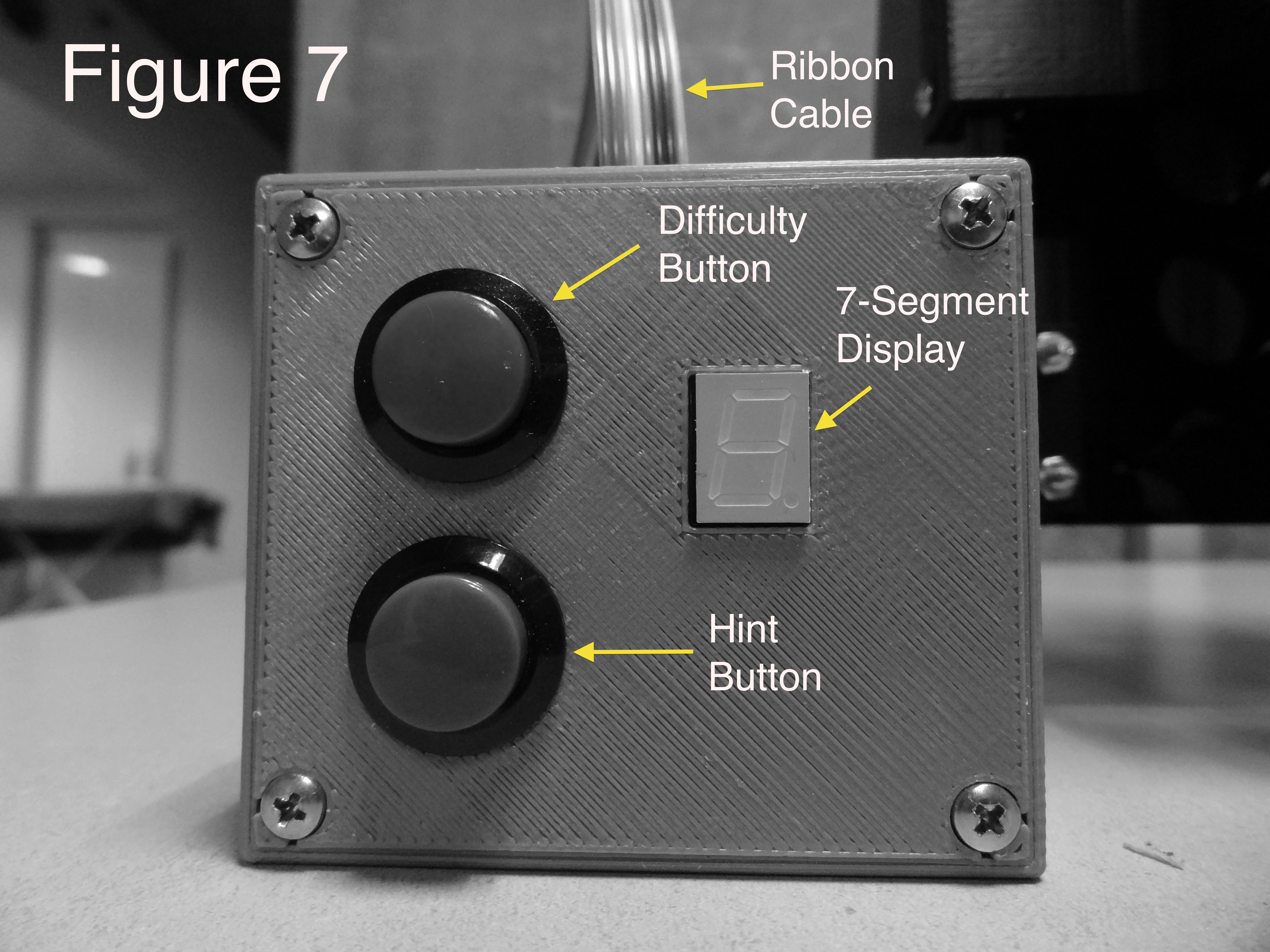
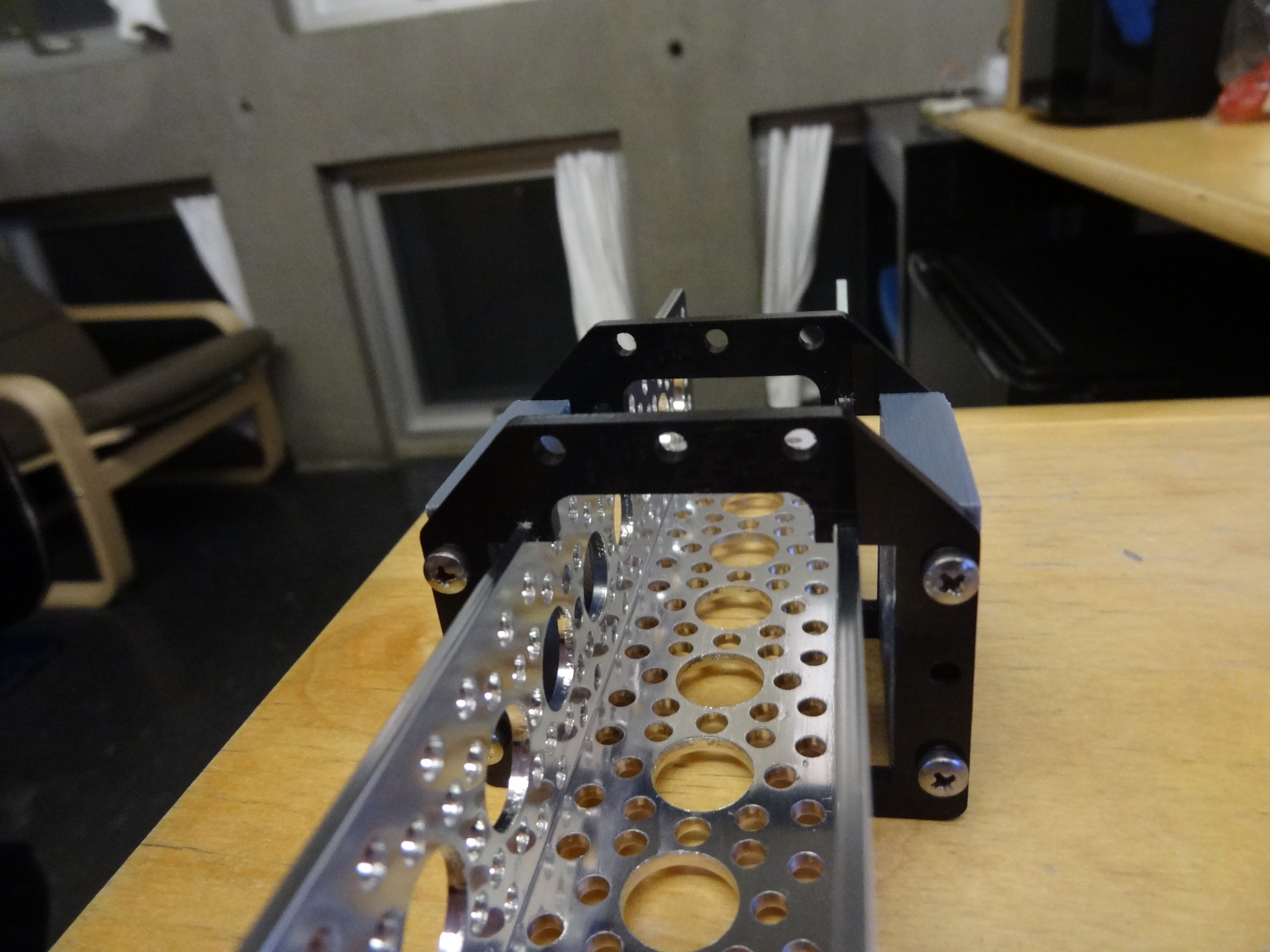
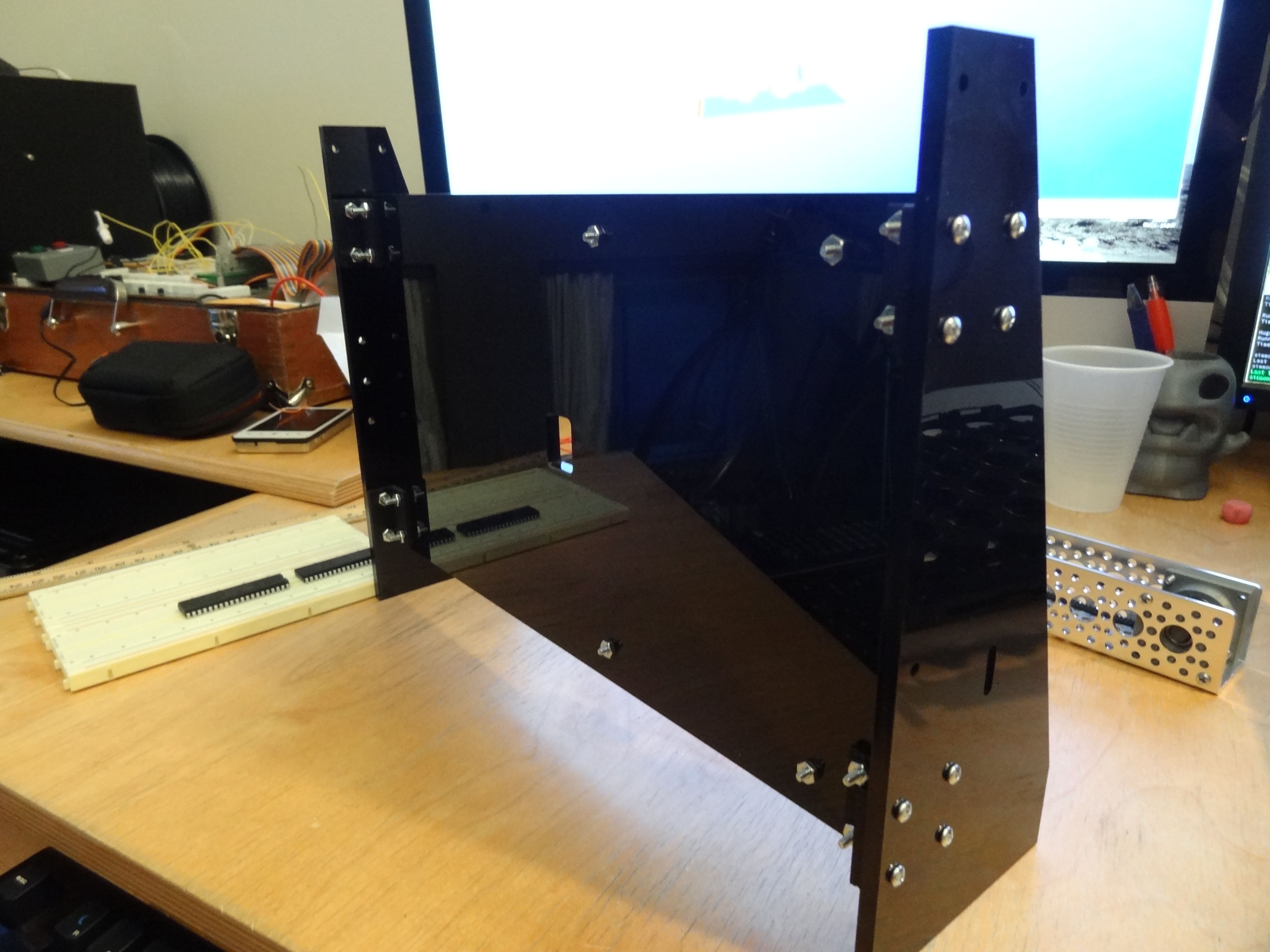
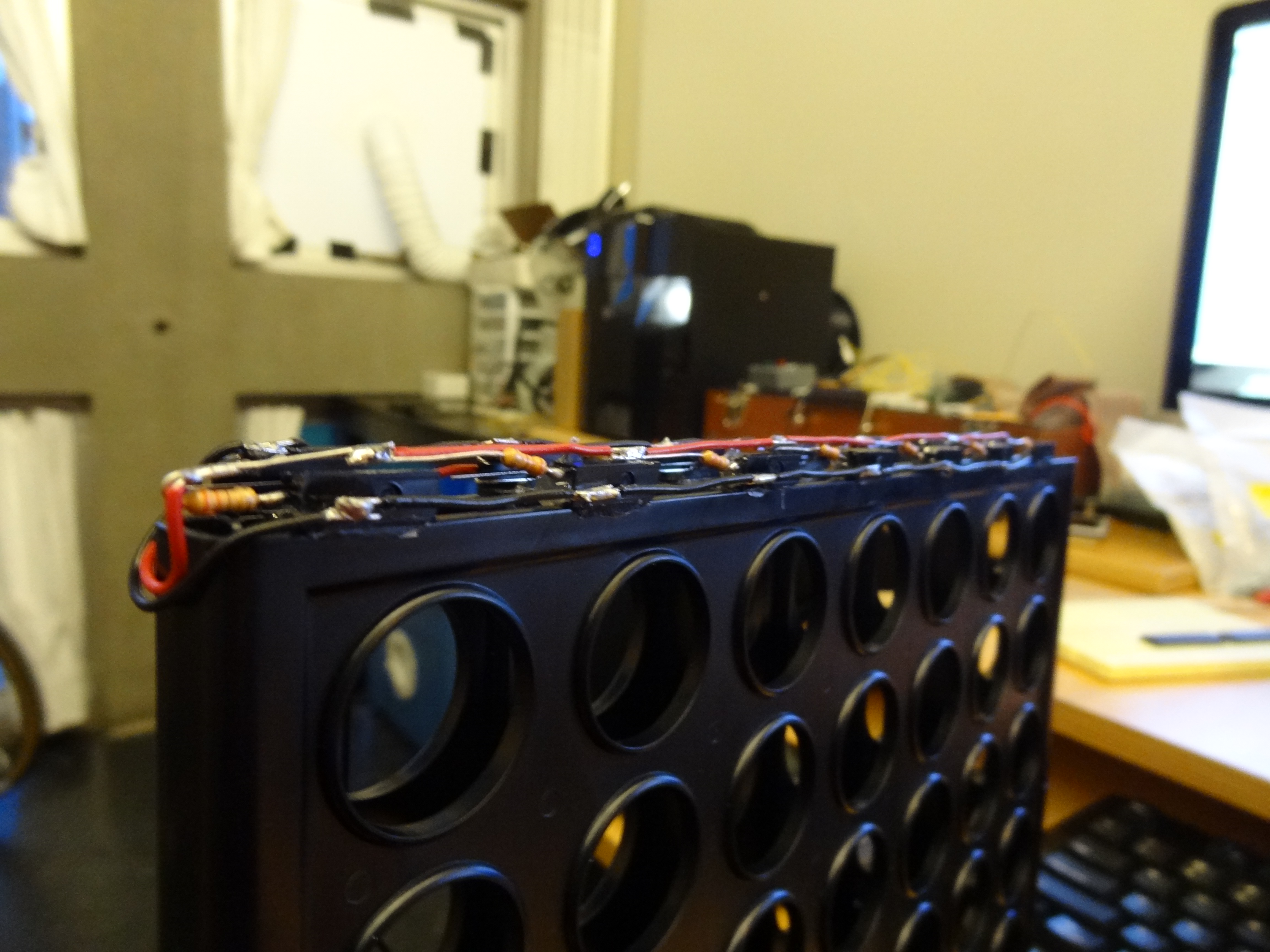
Build Photos
Just photos. The mechanical aspects of the robot are explained in the project report in the documentation section.
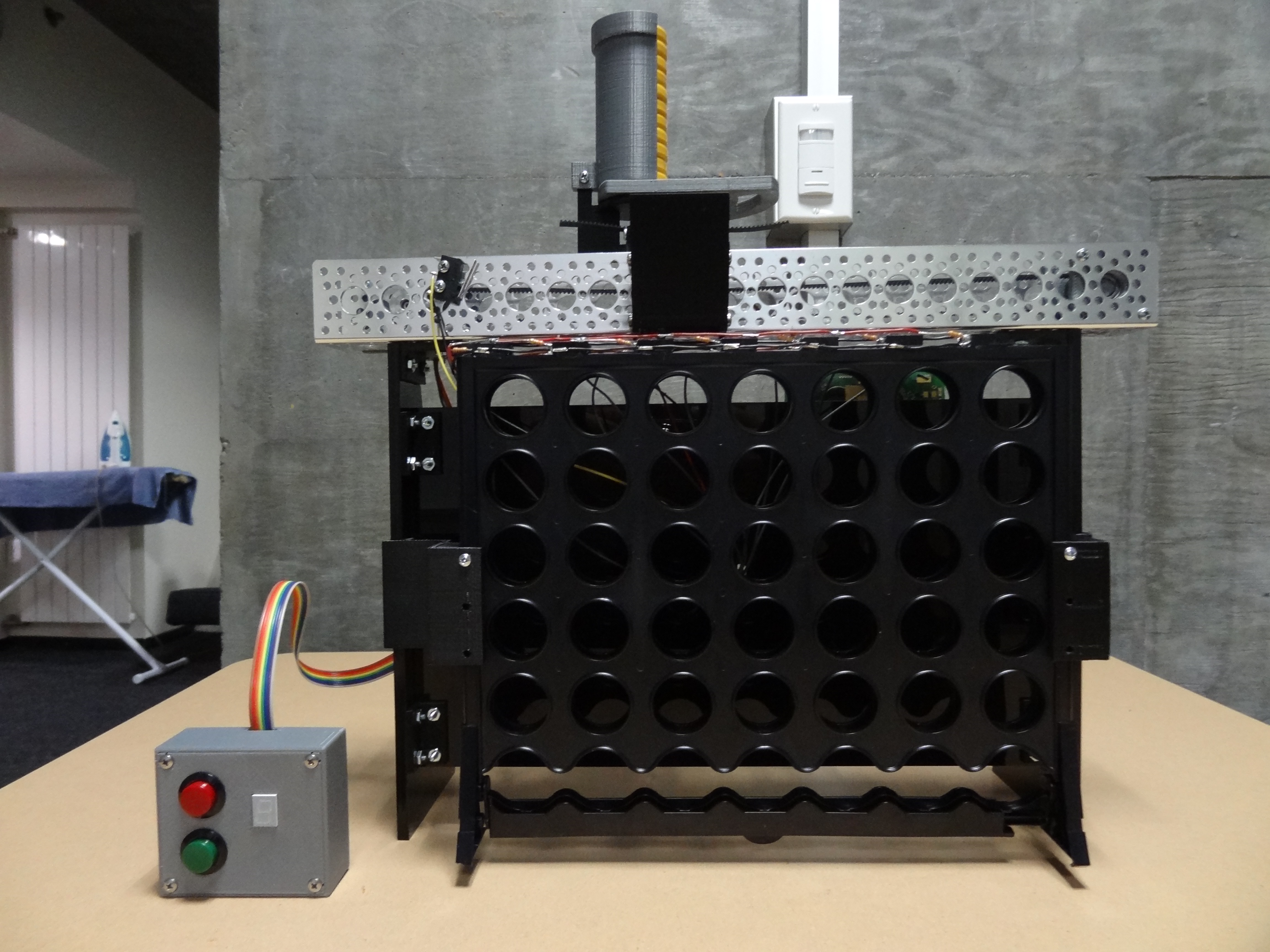
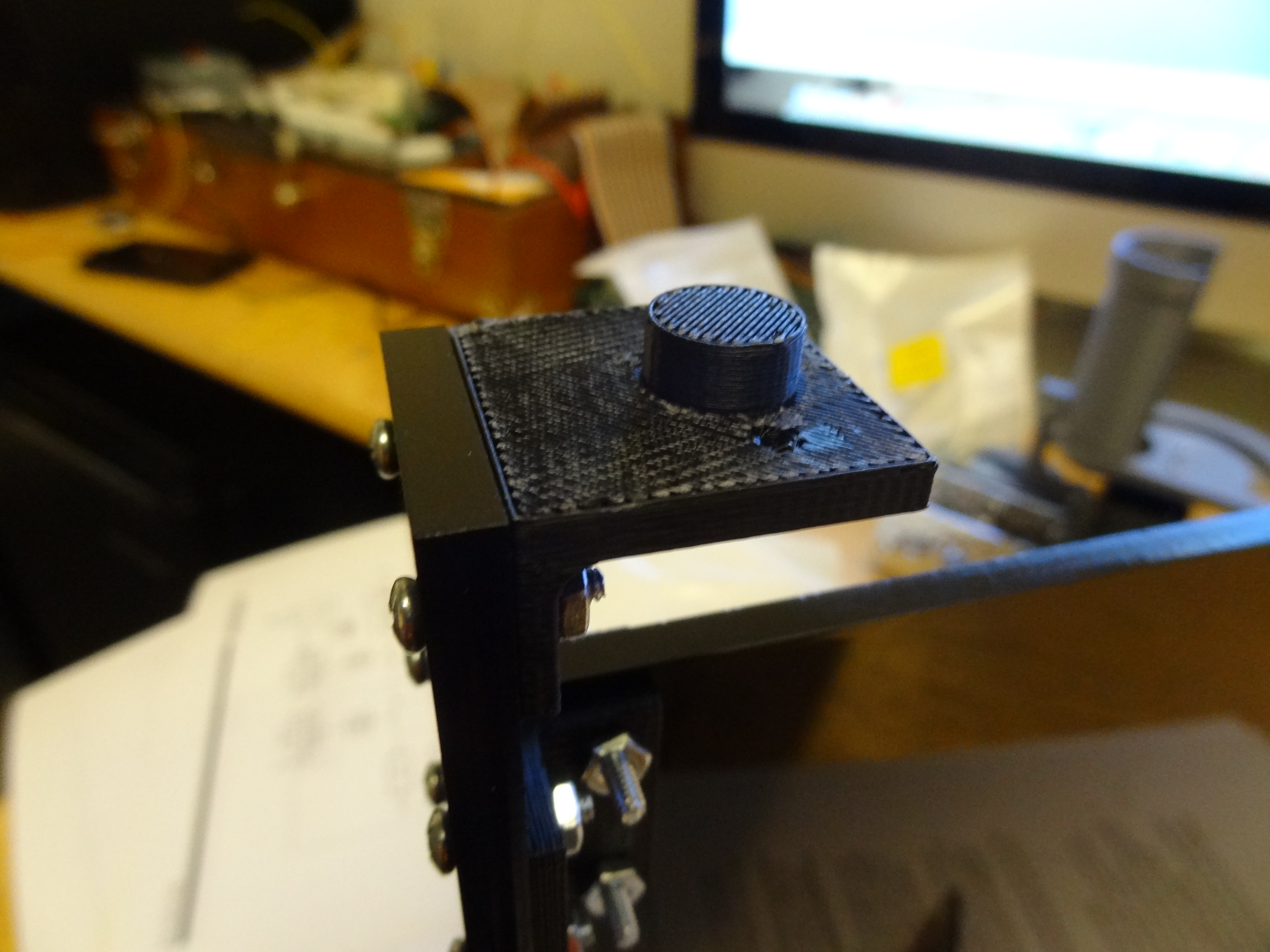
Control Panel

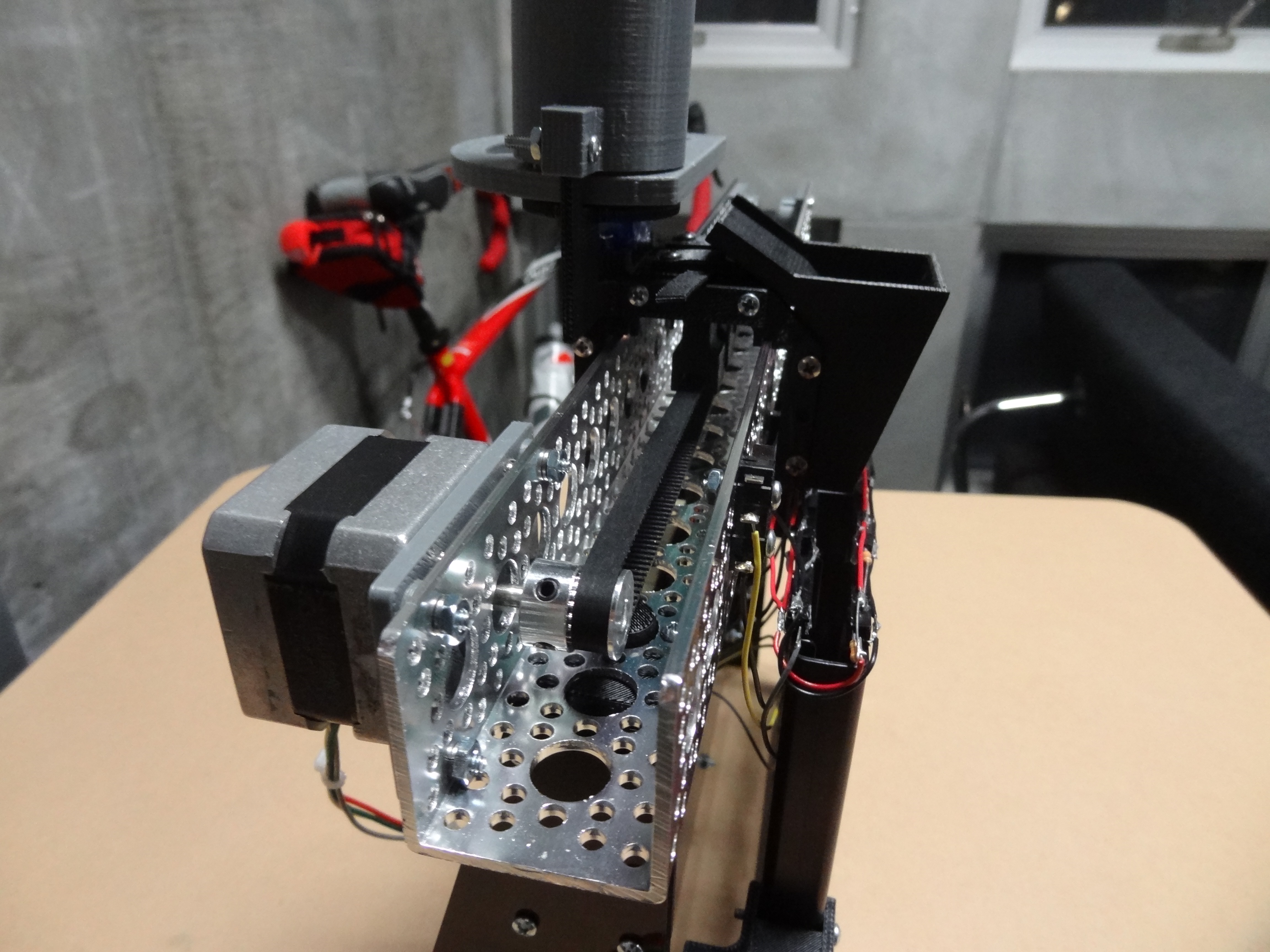
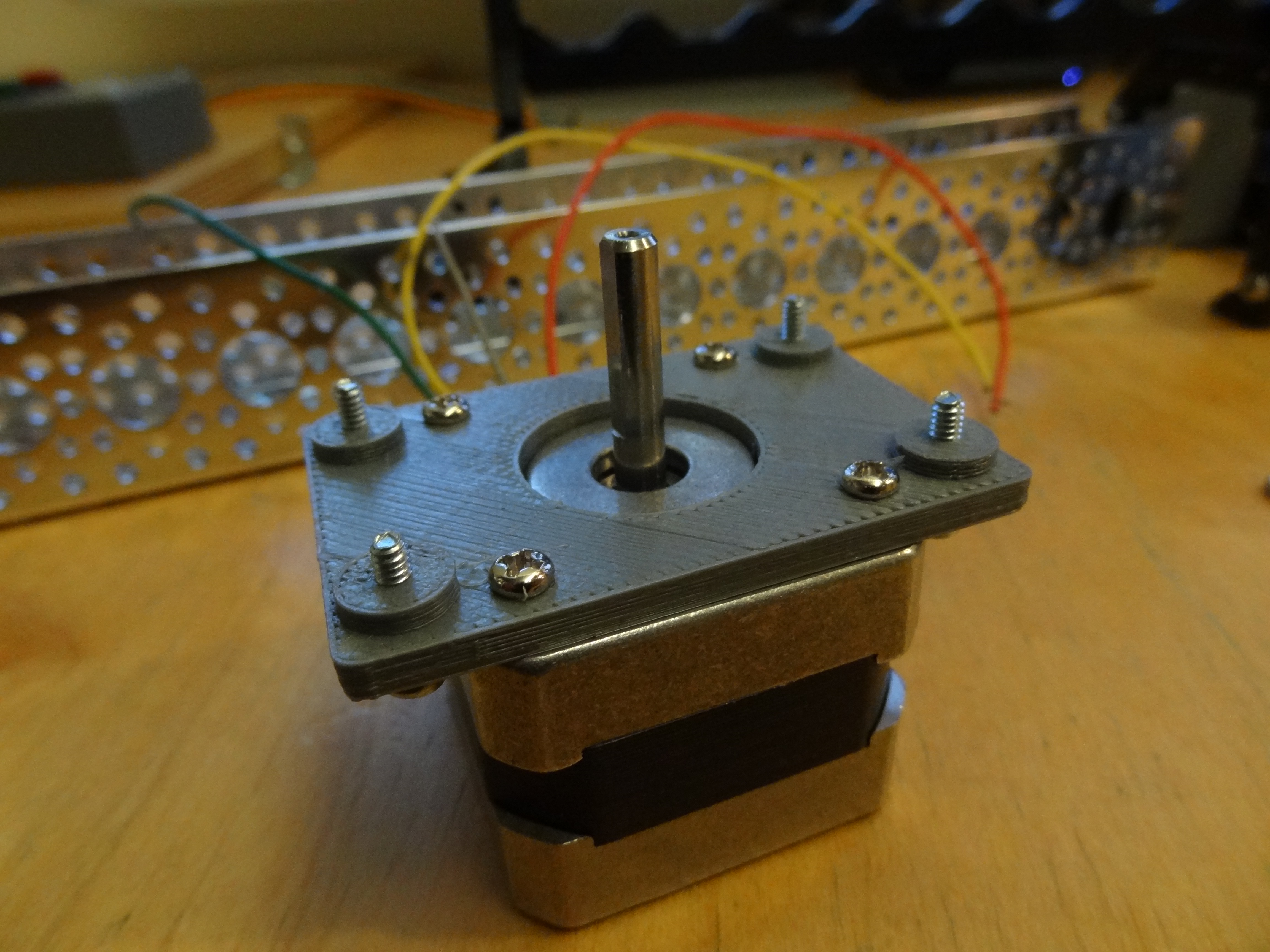
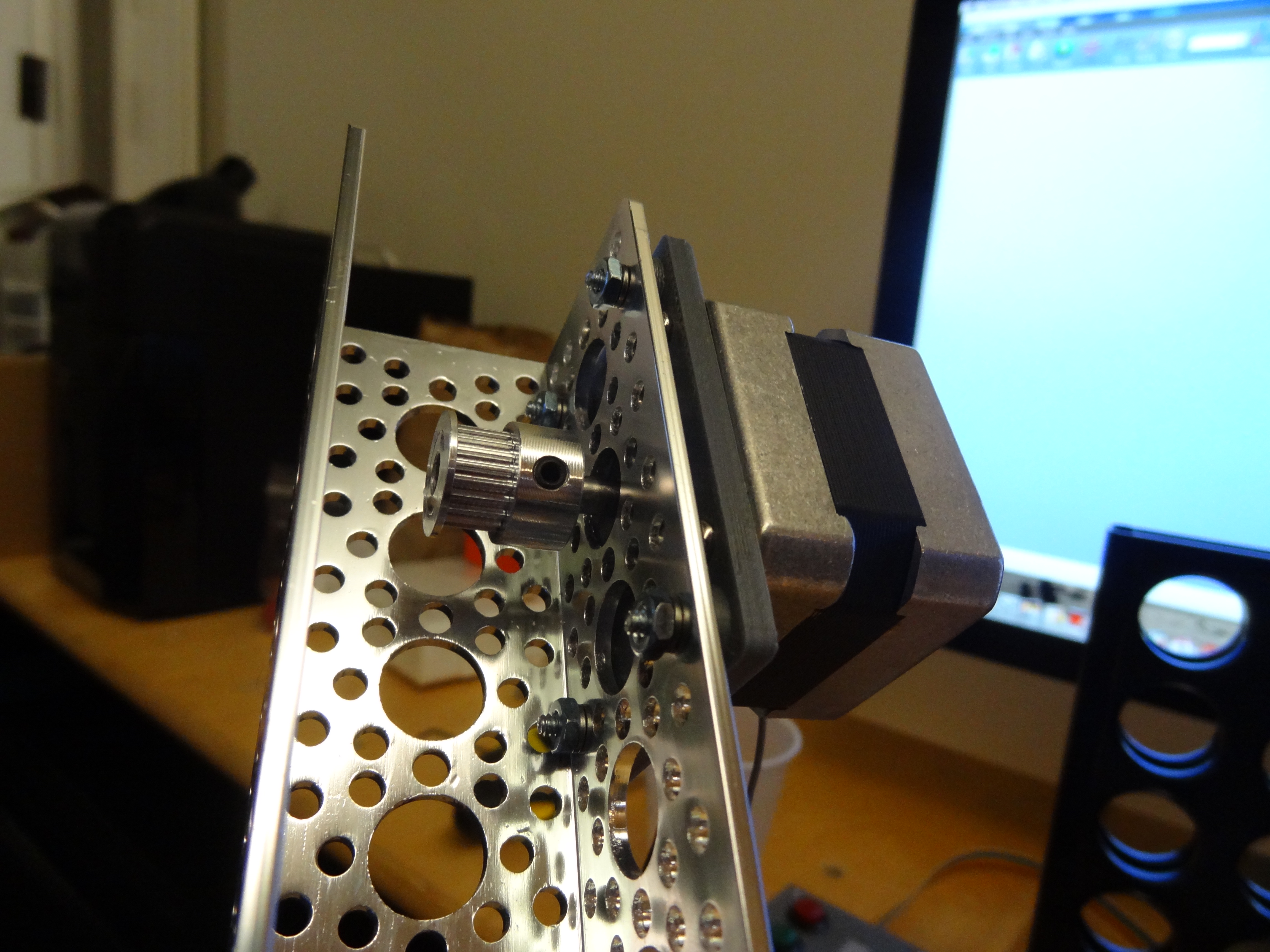
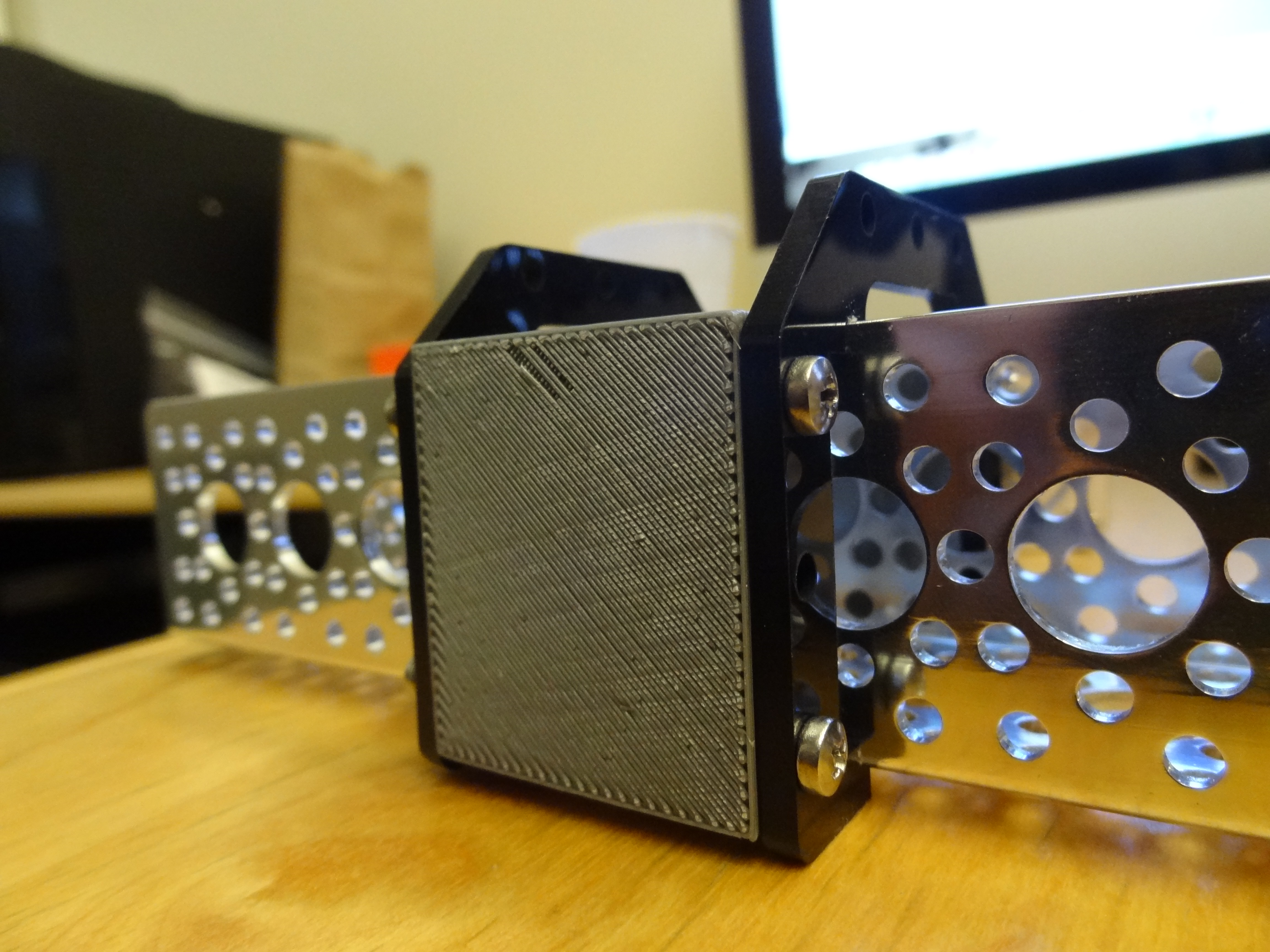
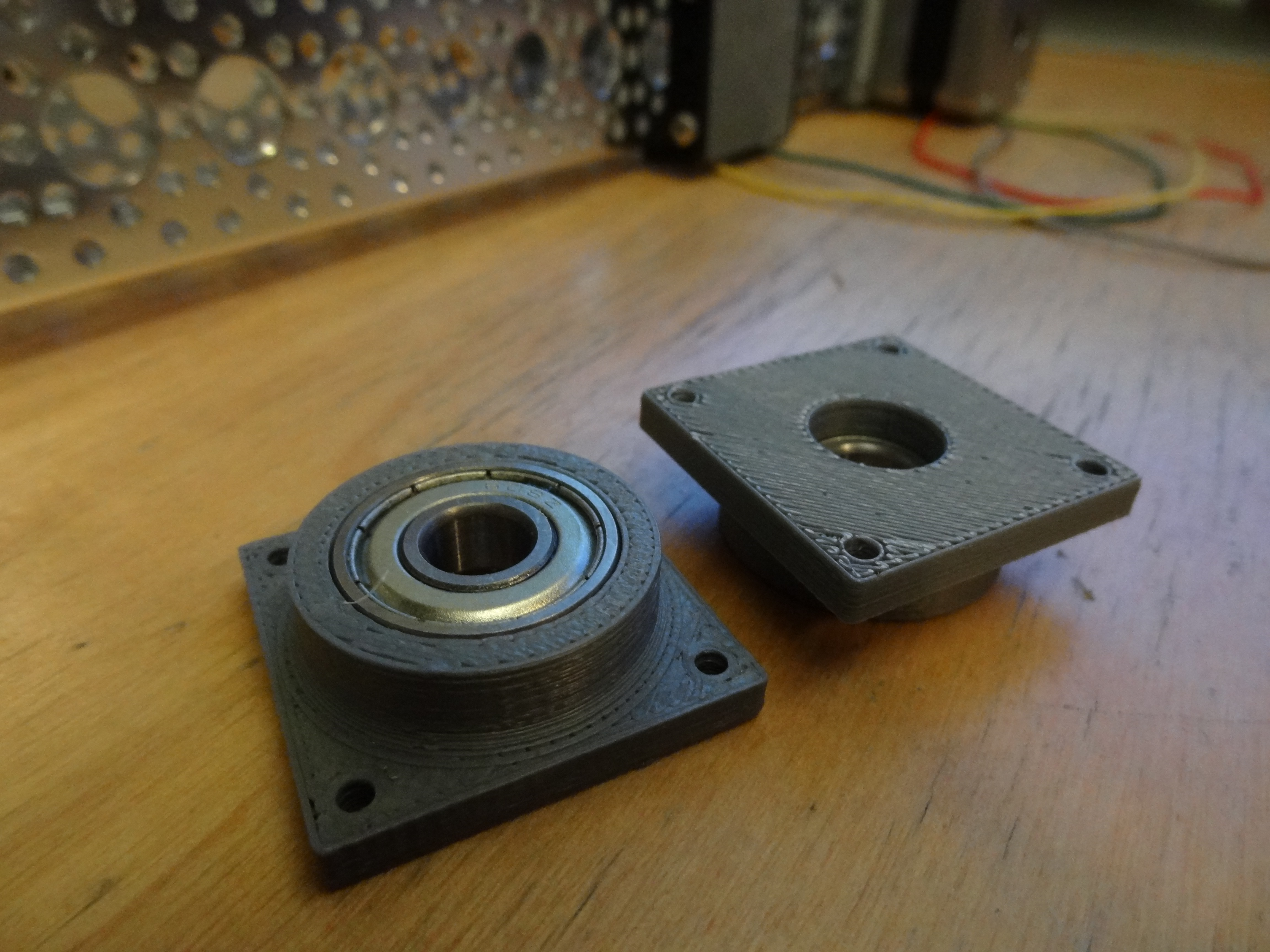
Motor Mount
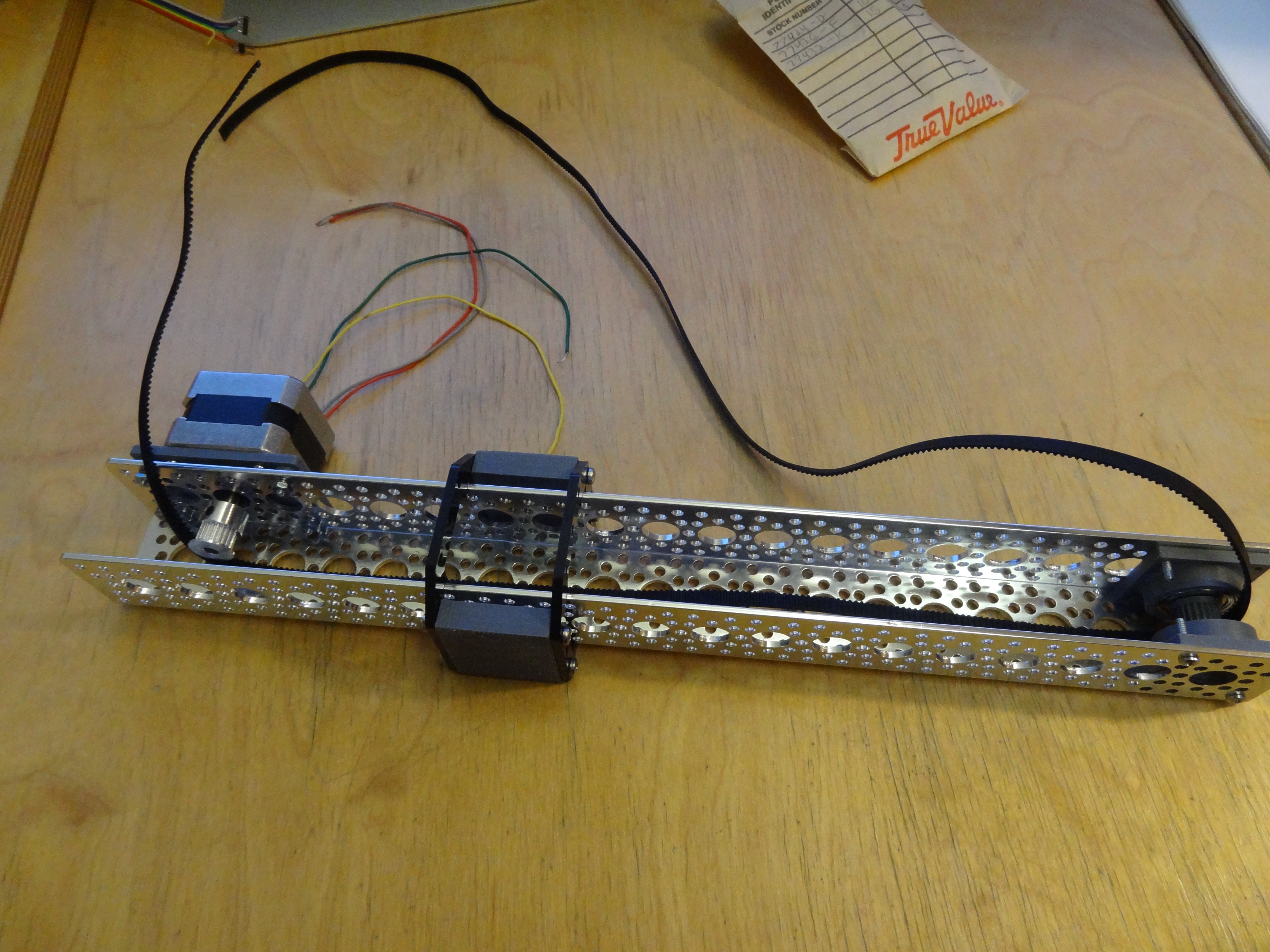
Slider Prototype
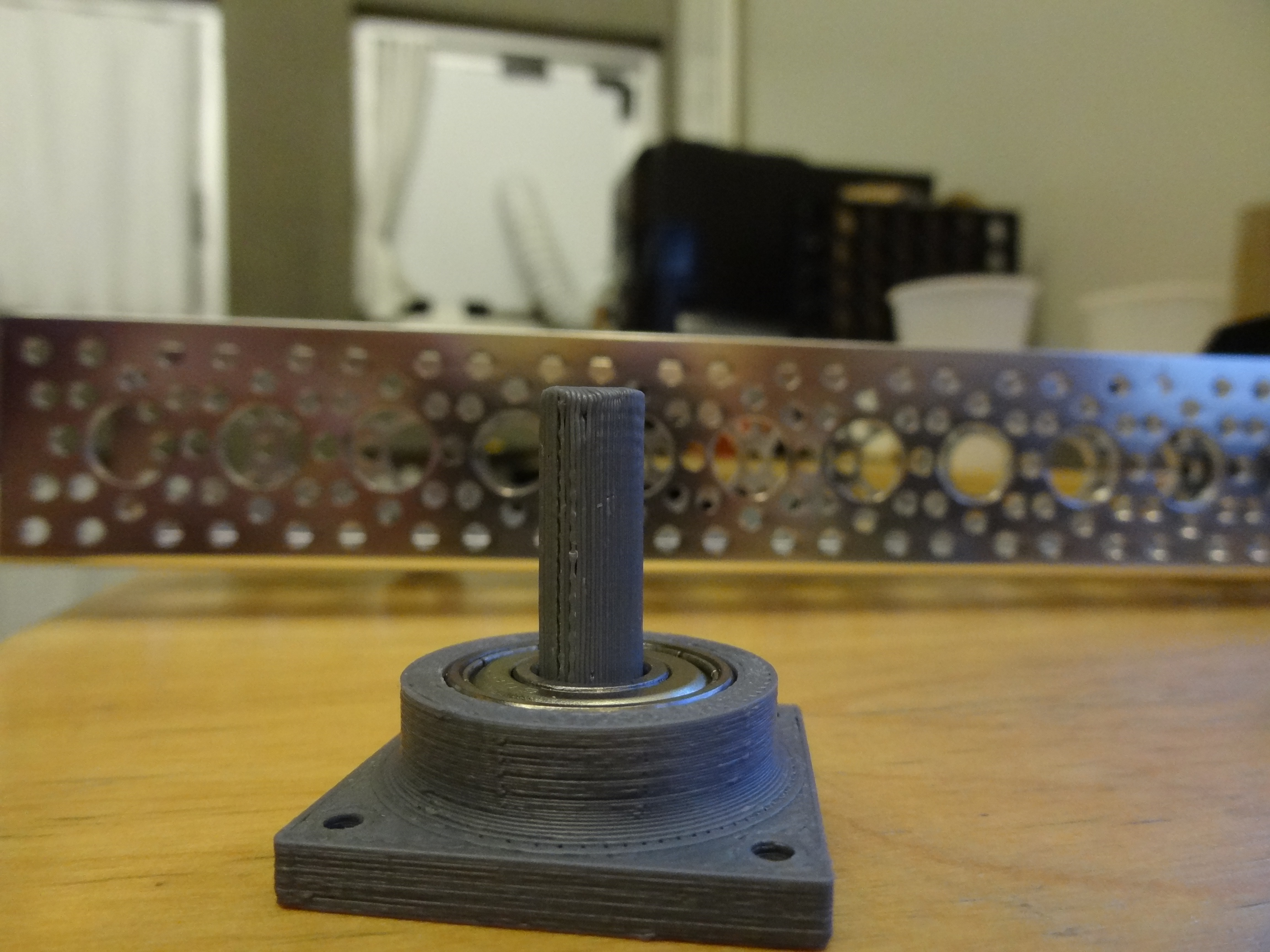
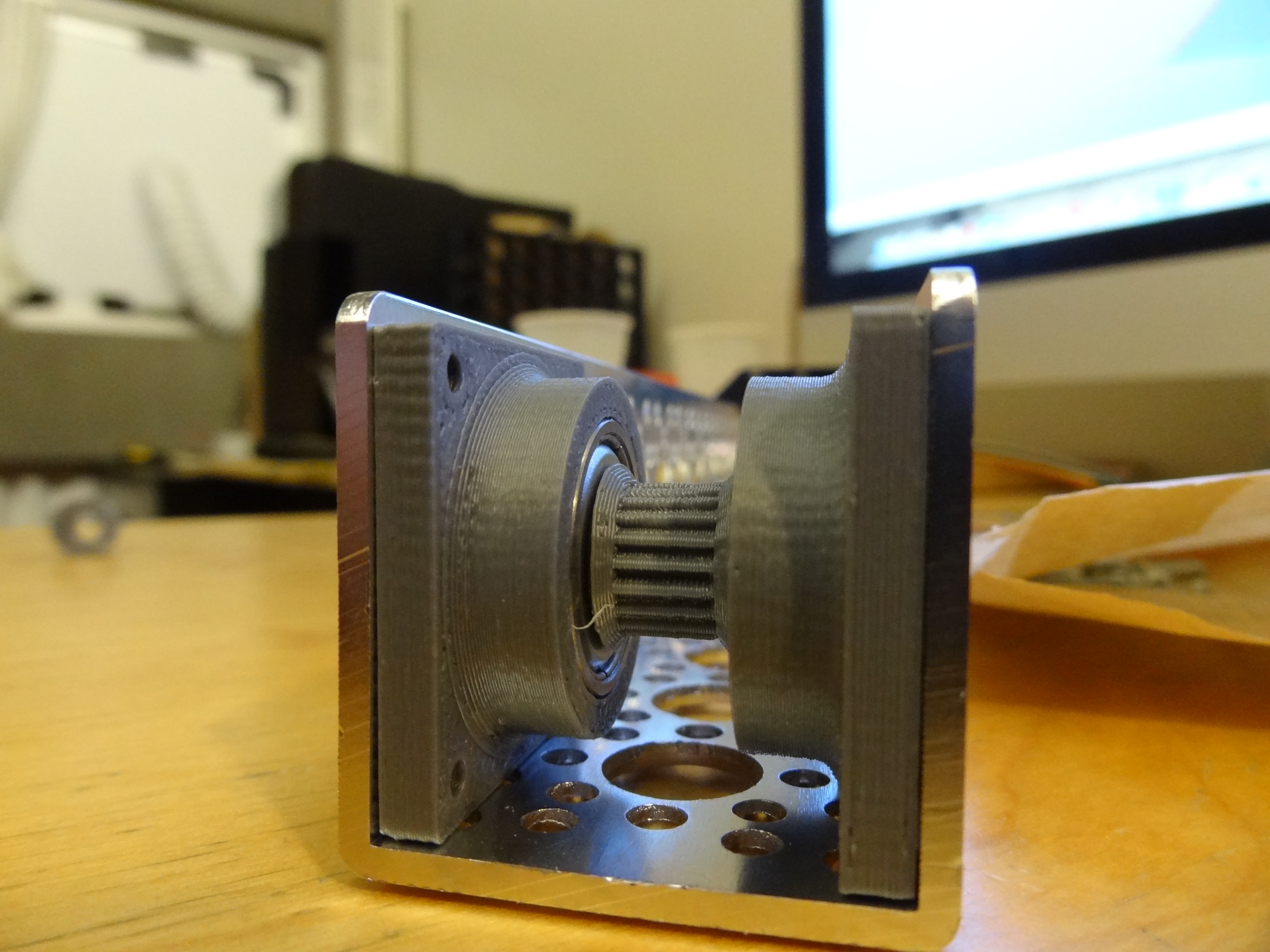
Idler
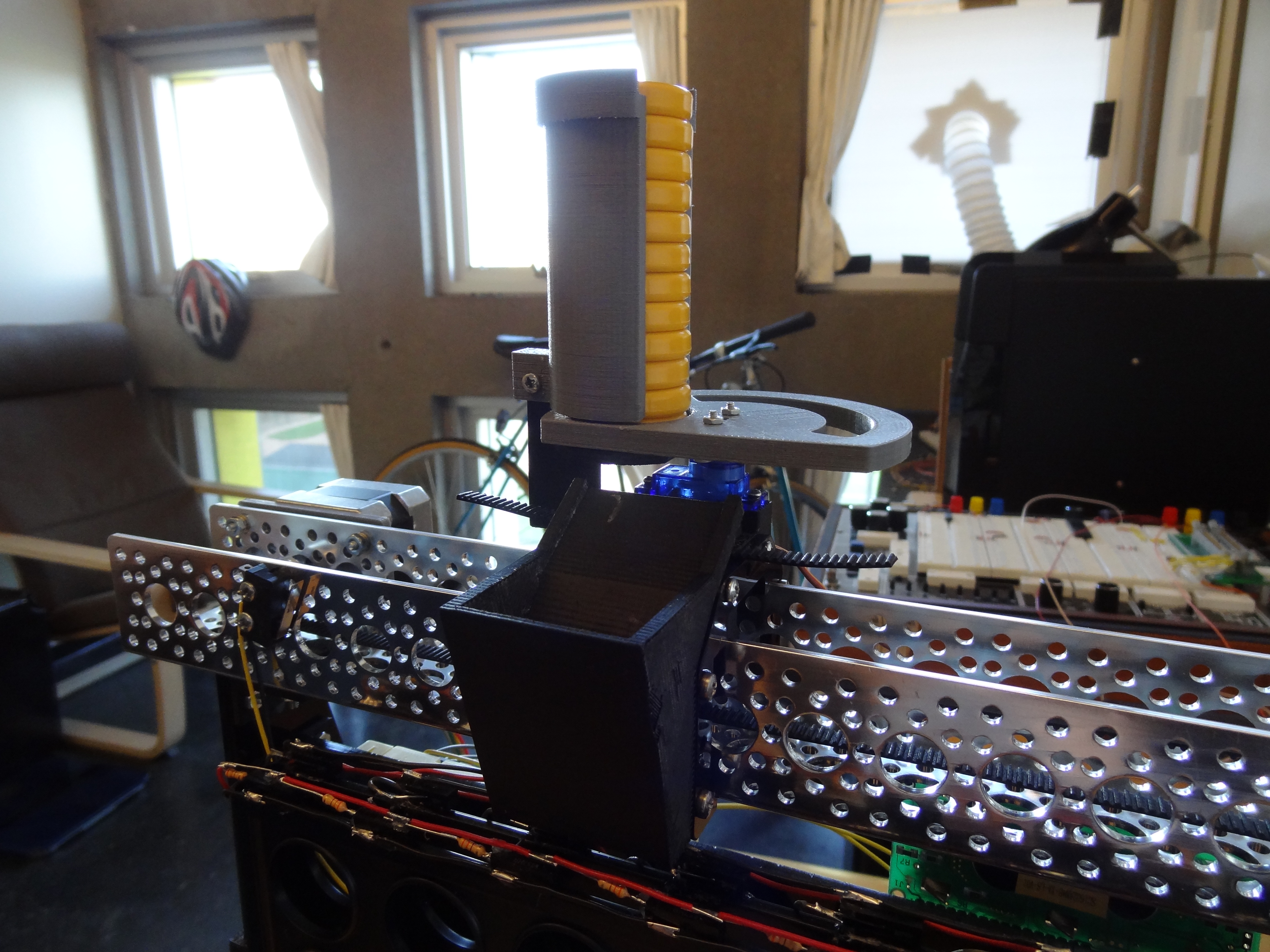
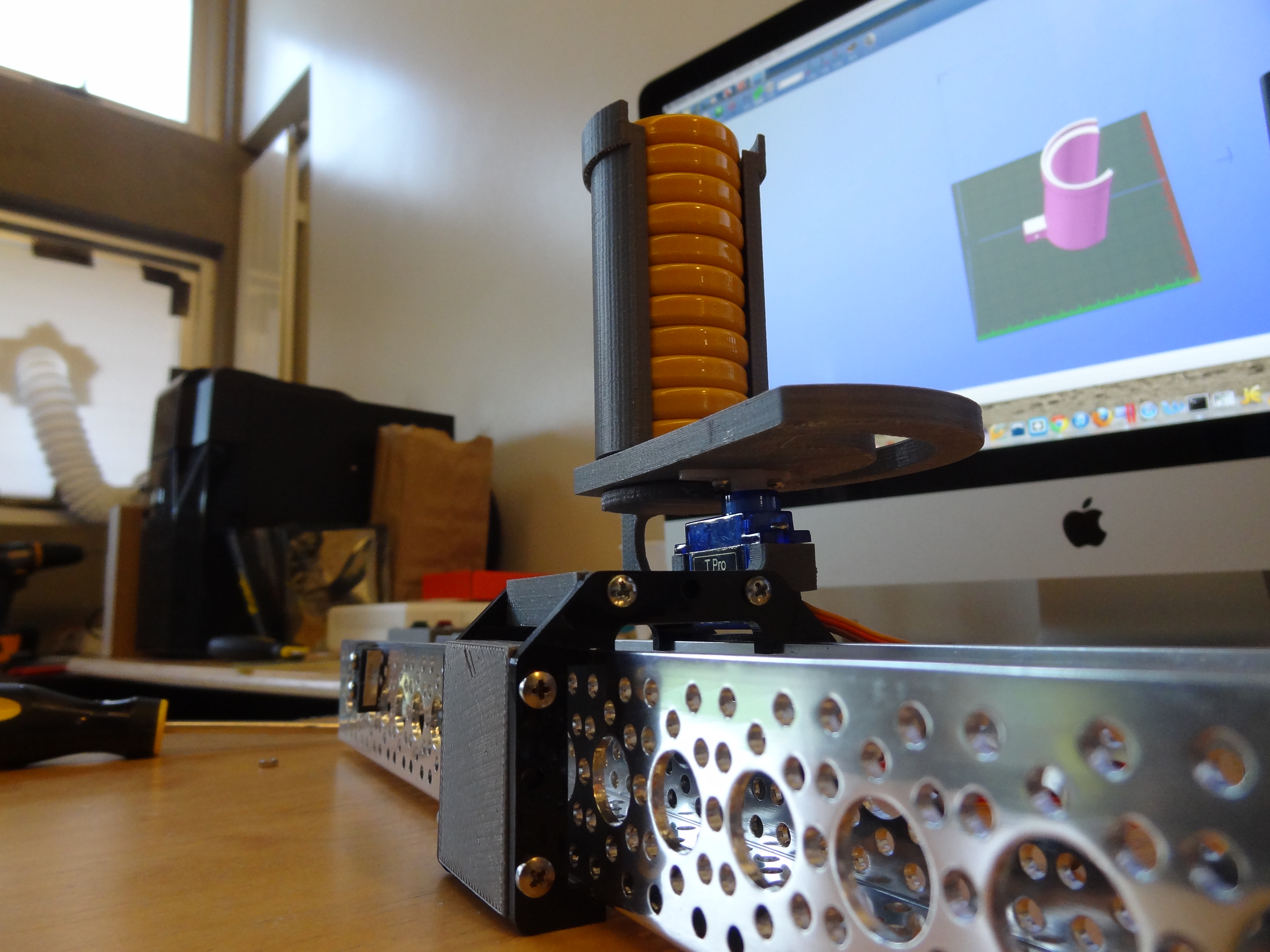
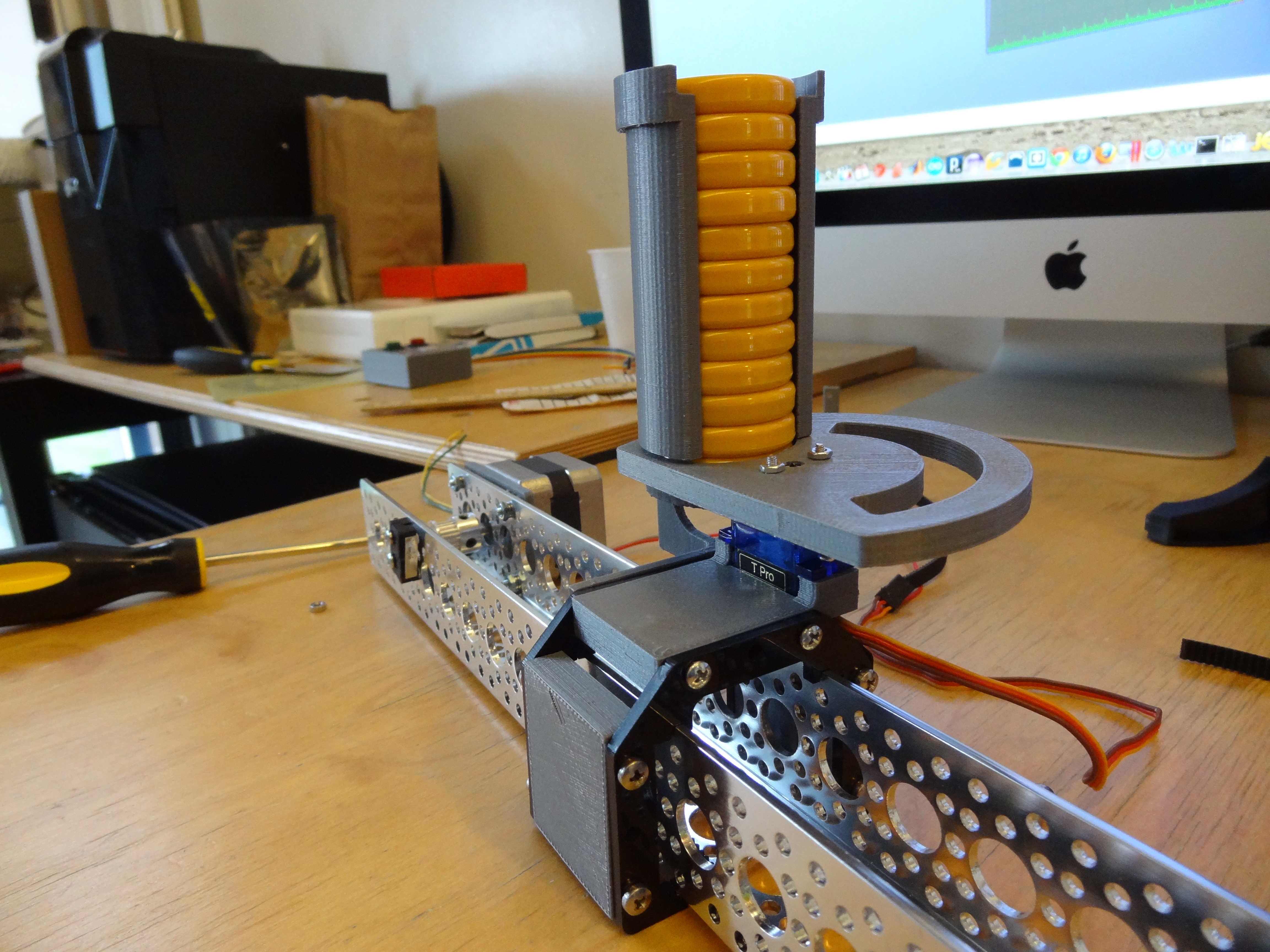
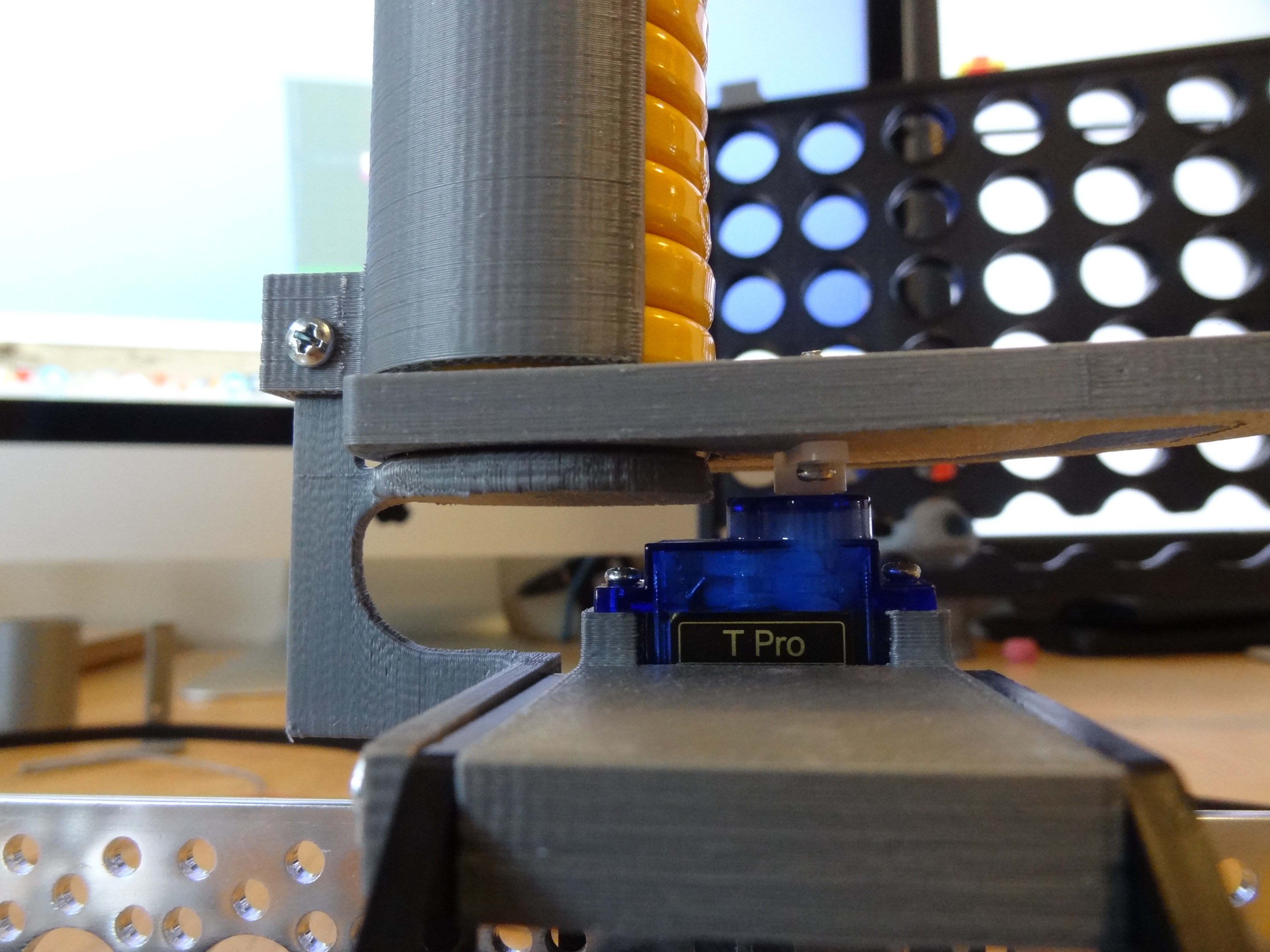
Chip Dispenser Prototype
Stand


Sensors

Stand-to-Linear Actuator Mount

Limit Switch

Completed