
WakeBright
Built in 2015
WakeBright is a morning alarm system designed to naturally awaken you with light. The WakeBright hardware connects between any lamp and a power outlet - allowing the WakeBright iPhone app to control the brightness of the lamp over Bluetooth 4.0. Using the WakeBright system is as simple as setting an alarm on your smartphone and choosing when you want the artificial sunrise to begin.
View Project
Dial
Built in 2014
Dial is a wireless, low energy bluetooth device that I made to control the playback of media on my computer. The device is able to detect a single click, double click, press-and-hold, clockwise and counter-clockwise rotation. This data is then used by a piece of computer software to control music and movie applications.
View Project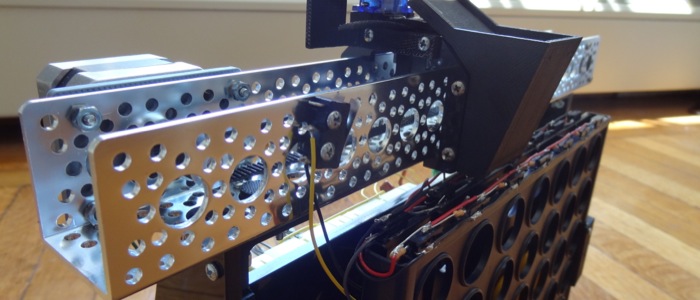
Connect Four Robot
Built in 2014
This Connect Four robot was my final project for my Microcomputer Project Laboratory course. We had complete freedom over choosing our final project, but there were two rules we had to follow. First, we had to use the Cypress PSOC 5LP kit that was given to us at the beginning of the course. Second, we had to use an 8051 micro-controller or another micro-controller that can be programmed in the same assembly language.
View Project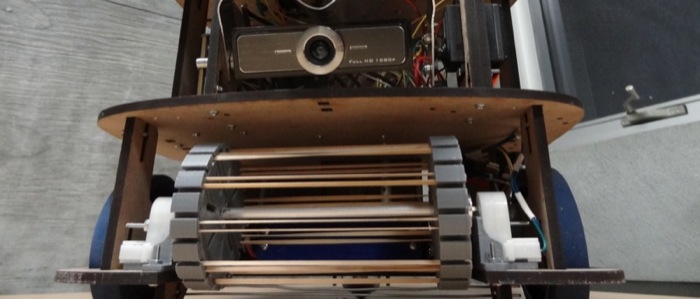
The Mailman
Built in 2014
In January of 2014 I competed in the MASLAB robotics competition here at MIT. It is a month long event of building a robot from scratch that culminates in a single-elimination final competition. This year there were 17 teams competing, which range from about 3-5 members. To make a very long, tiring, and stressful story short, we ended up coming in 1st place in the final competition.
View Project
DecaCharger
Built in 2013
I spent the summer of 2013 interning at a robotics startup called Romotive. They make the robots in the above photo. One of the projects I worked on was what I dubbed the “DecaCharger.” Simply put, the DecaCharger is a charger capable of charging ten devices at once. This was built to easily and quickly charge the many iDevices and robots that Romotive owns.
View Project